
Design and experiment of the seedling planting device for a sweet potato horizontal multiple transplanter
-
摘要:
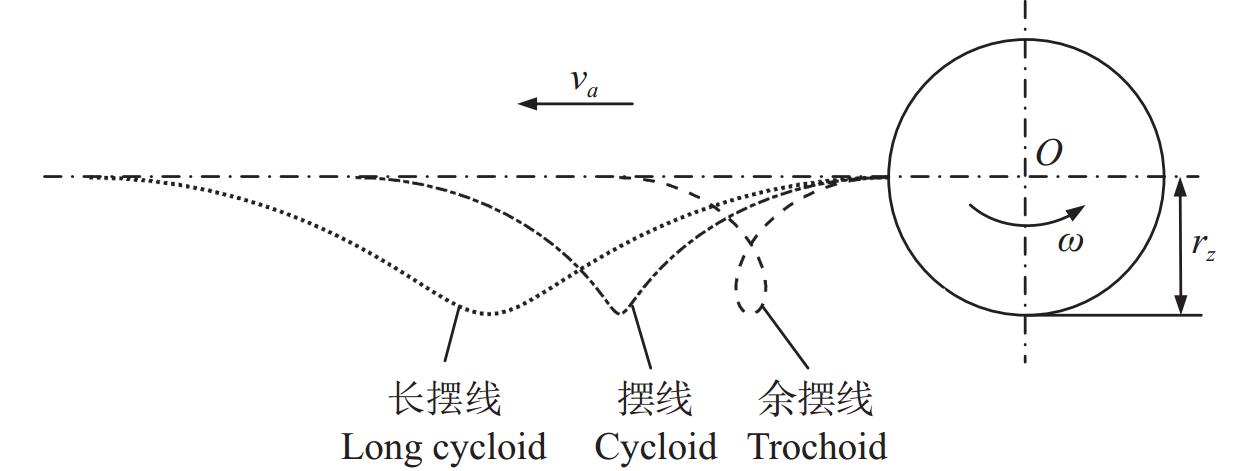
针对目前市场上缺少甘薯横向水平移栽机的问题,该研究根据横向水平栽插法移栽甘薯苗的农艺要求,设计了甘薯横向水平复式移栽机的栽苗装置。首先,通过理论分析栽苗装置栽插运动,确定影响甘薯苗移栽质量的主要因素为机器前进速度、链条速度、入土深度及栽苗爪高度等。再基于EDEM-RecurDyn耦合仿真建立栽苗装置-柔性甘薯苗-薯垄耦合作用模型,模拟栽苗作业过程,确定栽苗爪运动轨迹为长摆线,栽苗爪高度为50 mm,确定甘薯苗最终位姿和甘薯垄形态符合甘薯水平栽植农艺要求。最后采用Box-Behnken试验设计方法,以机器前进速度、链条前进速度和入土深度为试验因素,以栽植深度合格率、栽植株距合格率、移栽效率为评价指标,进行了响应面试验,构建优化模型。试验确定移栽机最优工作参数组合为:机器前进速度0.4 m/s,链条前进速度0.2 m/s,入土深度46 mm。该参数组合下栽植深度合格率为92%,栽植株距合格率为92%,移栽效率为263株/min。研究结果可为甘薯横向水平移栽机设计及优化提供参考。
Abstract:Horizontal planting has been used for fresh sweet potatoes in recent years. A large number of sweet potatoes can be produced, even potato block sizes. It is necessary to place potato seedlings after trenching transversely on the potato ridges when using the horizontal transplanting manually. The labor-intensive and inefficient have severely constrained the development of the sweet potato industry. However, there is no horizontal transplanting machine for sweet potatoes. In this study, a horizontal transplanting machine was designed for sweet potatoes, according to the agronomic requirements. Two rows of sweet potatoes were realized in the rotary tillage, horizontal planting, soil covering and ridge repair, and laying drip irrigation belts in one operation. High transplanting quality and transplanting efficiency were achieved in the current process of sweet potato seedling transplantation. The transplanting motion of sweet potato seedlings was theoretically studied using the EDEM-RecurDyn coupling simulation. The main influencing factors on the transplanting quality of sweet potato seedlings were determined as the forward speed of the transplanting machine, chain speed, soil depth, and seedling claw height. A coupling model was constructed to simulate the seedling operation process for the planting device-flexible sweet potato seedling-sweet potato ridge. The simulation determined that the seedling trajectory was a short cycloid, and the seedling claw height was 50 mm. An analysis was made on the movement of sweet potato seedling posture and soil particles during transplantation. The final position and ridge shape of sweet potato seedlings were confirmed, according to the agronomic requirements for horizontal planting. The Box Behnken experimental design was used with the machine forward speed, chain forward speed, and soil depth as experimental factors, while the qualified rate of planting depth, planting spacing, and transplanting efficiency as evaluation indicators. The level was also evaluated for the influence of experimental influencing factors on various experimental indicators. A quadratic regression orthogonal experiment was conducted to determine the optimization model. The validation test results showed that the optimal combination of working parameters was the moving forward speed of 0.4 m/s in the machine, the moving forward speed of 0.2 m/s in the chain, and the soil depth at 46 mm. At this time, both qualified rates of planting depth and spacing were 92% at the transplanting efficiency of 263 plants/min. The relative error between the average value of the field experiment and the optimized value was less than 5%, indicating an accurate regression model. The number of sweet potatoes planted using a horizontal transplanting machine was 3-6, and the size of the sweet potato blocks was uniform, especially suitable for the commodity properties of fresh sweet potato blocks. The transplanting machine performed better planting, fully meeting the agronomic requirements for horizontal planting of sweet potatoes. The findings can provide a strong reference for the design and optimization of sweet potato transplanting machines.
-
Keywords:
- agricultural machinery /
- design /
- tests /
- sweet potato seedling /
- transplanter /
- optimization
-
0. 引 言
蝴蝶兰作为一种多年生附生草本植物,因其蝶形花朵和高观赏价值深受喜爱[1]。然而,传统的人工培养方式劳动强度大、工作枯燥、效率低下。此外,人工分拣和培养过程容易破坏种苗的无菌环境,增加种苗感染病害的风险。随着科技的发展,自动化、人工智能和机器人技术逐步应用于蝴蝶兰种苗分拣、切割、栽种等环节中。在这些自动化生产环节中,以实现种苗组织的自动化培养。对植物组织快速精确的目标检测是其中的关键技术。
对于植物组织的目标检测,早期主要采用图像处理和机器学习方法。马战林等[2]利用建立的机器学习模型和面域数据反演区域冬小麦产量,实现作物生长模型与机器学习算法的应用耦合。张领先等[3]利用可见光光谱颜色特征结合支持向量机进行温室黄瓜霜霉病病斑图像分割,采用SURF(speeded up robust features)特征及形态学操作对分割结果进行优化。为温室黄瓜霜霉病的科学防治提供参考。张开兴等[4]将图像处理技术和BP神经网络算法引入到玉米叶部病害识别诊断中,实现了玉米叶部常见6种病害的分类识别。传统的机器学习方法在植物组织的目标检测中易受外界环境影响,依赖手动输入调整阈值,训练时间较长且精确度较低。
近年来,基于深度学习的目标检测方法以其较强的适用性与泛化能力在农业自动化领域受到广泛关注。李天华等[5]采用改进的YOLOv4深度学习模型对不同成熟程度的番茄进行检测,结合HSV(hue saturation value)方法对番茄的红色区域进行分割,提高识别成熟期番茄的准确性。刘毅君等[6]采用改进的Faster-R-CNN神经网络对马铃薯表面的损伤进行检测,通过构建新的特征提取网络提升检测精度。LE等[7]提出了一种用于复杂环境下杂草检测方法,在Faster R-CNN模型中引入Inception-ResNet-V2特征提取模块,大幅度提升了检测精度。杨坚等[8]对YOLOv4-tiny进行改进,在模型中增加了76×76的检测头,并在主干网络中引入了卷积注意力模块,以增强对存在部分遮挡的番茄的识别能力。ZHOU等[9]将MobileNetV3部署到Android平台,通过开发的APP实现猕猴桃产量估算。此类研究虽提升了检测精度,但在模型的轻量化程度上关注较少,难以部署在储存能力和算力较差的边缘设备中,在实际生产中的泛化性较差。
在模型轻量化研究领域,YAN等[10]提出了一种轻量化的YOLOv5目标检测算法,用于实时筛选成熟苹果并优化采摘动作。范天浩等[11]提出了一种轻量化金银花识别模型。通过引入EfficientNet网络结构改进YOLOv5s,改进后模型参数量仅为原始模型的55.5%,但在平均精度上仅提升了0.6个百分点。此类研究专注于模型的轻量化程度,不适用于小型植物组织目标检测任务。
在种苗组织自动化培养中,需要同时满足检测精度与检测速度的要求。但现有算法的部署往往受限于边缘设备的存储容量和计算能力[12]。因此,需要设计一种高精度的轻量化检测算法[13]。此外,在对蝴蝶兰种苗的后续夹取工作中,选择黑色块茎作为夹取部位对种苗造成损伤较少,但黑色块茎部位目标相对较小,故检测模型应当对小目标检测精确度较高。
针对上述问题,本文在YOLOv8n的基础上设计了一种蝴蝶兰种苗检测模型YOLOv8n-Aerolite,通过对主干网络、颈部网络和头部网络的改进,重点提升模型的轻量化程度,同时实现检测精度与检测速度的平衡,以期为蝴蝶兰种苗的自动化夹取提供一种快速精确的轻量化目标检测算法。
1. 材料和方法
1.1 数据采集
本次试验采用在实验室条件下拍摄的蝴蝶兰种苗正视角的高清RGB图像,拍摄设备为Intel深度相机D455,图像存储格式为JPG格式,分辨率为
3072 ×2048 像素。由于实际部署中很难确定蝴蝶兰种苗摆放的具体姿态,故拍摄时对不同姿态放置的蝴蝶兰种苗都需要拍摄,在灯光下,需要进行夹取的块茎部位为黑色。为提高模型的泛化能力,丰富数据多样性,在多种条件下分别采集了蝴蝶兰种苗图像,样例如图1所示。1.2 数据集制作
拍摄完成后使用深度学习图像标注软件LabelImage对这些图像进行筛选和标注。在标注过程中,将蝴蝶兰种苗上的叶片、胚根和黑色块茎用矩形框进行标注,矩形框的位置和大小表示目标检测框的信息,检测框的宽度和高度由左上和右下坐标间接表示。标注完成后,将生成的标注信息保存为YOLO模型所需的txt标签文件。总标注图像数量为
1630 张,按照8:2的比例划分为训练集和测试集,具体数量为训练集图像1304 张,测试集图像326张,图像标注示例如图2所示。对标注后的训练数据集进行统计,标注框数目如图3所示。共有标注框
5716 个,其中黑色块茎标注框数目1304 个、胚根标注框数目2587 个、叶片标注框数目1825 个。每株蝴蝶兰种苗一般具有1个黑色块茎、两个胚根、两个叶片,标注中的类别数目比例与真实种苗情况基本一致。2. 蝴蝶兰种苗检测方法
2.1 YOLOv8n目标检测
YOLOv8n是一种高效的目标检测算法[14]。由主干网络、颈部网络和头部网络组成。主干网络采用C2f模块,使用无锚点检测方法,以实现更准确地边界框预测[15]。颈部网络通过使用路径聚合网络(PANet)提升对不同尺度对象的检测能力[16]。头部网络采用解耦设计,提高模型的专门学习能力和精度[17]。
然而,在应用于特定场景时,YOLOv8n仍存在不足。例如,面对蝴蝶兰种苗目标时,其特征提取能力对小目标的适应性尚显不足;在资源受限的边缘设备上,其模型轻量化水平和推理速度难以完全满足部署需求与实时性要求。针对这些问题,本文在YOLOv8n模型的基础上对主干网络、颈部网络和头部网络分别进行了改进。
2.2 YOLOv8n-Aerolite算法
首先,在主干网络部分,YOLOv8n-Aerolite引入了更高效的StarNet结构,结合深度可分离卷积和星形操作,提高特征提取效率。颈部网络通过采用C2f_Star模块增强特征表达能力。此外,头部网络采用轻量级共享卷积检测头Detect_LSCD,通过共享卷积操作减少计算复杂度,进一步提升小目标的检测精度。YOLOv8n-Aerolite目标检测算法的整体架构如图4所示。
2.2.1 主干网络改进
YOLOv8n-Aerolite 在原始 YOLOv8n 模型的基础上引入了全新的主干网络结构 StarNet,替换了原有的主干网络。StarNet 的整体架构由多个特征提取阶段(Starstage)组成,每个阶段包括一个卷积下采样层和多个星形块。这些特征提取阶段通过逐步降低特征图的分辨率并增加通道数,以实现高效的特征提取能力。StarNet 的设计结合了星形操作(逐元素乘法)与深度可分离卷积,有助于减少模型的参数量和计算复杂度。每个星形块由一个 7×7 的深度可分离卷积和多层感知机制组成,其中星形操作替代了传统的加法操作,旨在捕捉特征间的关系。该设计为提升模型轻量化性能提供了潜在可能。
在StarNet的核心模块StarBlock中,采用了多个卷积和非线性激活层组合,以高效地提取和融合图像特征。首先,通过深度可分离卷积层,该层利用7×7的卷积核以及分组卷积的方式捕捉输入特征图的局部空间特征。具体处理过程如式(1)所示。
x′=d(x) (1) 式中x表示输入特征图,x′表示经过深度可分离卷积后的特征图,d(⋅)表示深度可分离卷积计算函数。
特征图在经过深度可分离卷积后利用两个全连接层(FCLayer)将特征通道数扩展,通过ReLU6激活函数控制输出并通过逐元素乘法[18]进行特征融合,从而增强特征的表示能力,具体处理过程如式(2)所示。
{x1=FCLayer1(x′)x2=FCLayer2(x′)x″ (2) 式中FCLayer1和FCLayer2是两个全连接层, x_1 和 x_2 是两个全连接层后的特征图,ReLU6[19]表示激活函数计算过程, \odot 表示逐元素乘法操作, x'' 表示通过激活函数特征融合后的特征图。
随后,通过1×1卷积层将特征通道数还原至原始维度,并通过第2个7×7的卷积层进一步提取高阶特征。为了增强模型的泛化能力,引入了DropPath随机丢弃路径,通过随机丢弃部分通道来减少过拟合的风险,从而在保证计算效率的同时,保持模型的高表达能力和泛化能力。StarBlock模块的结构如图5所示。
![]() 图 5 StarBlock结构示意图注:\otimes 表示残差连接。Figure 5. Schematic diagram of the StarBlock structureNote: \otimes denotes residual connection.
图 5 StarBlock结构示意图注:\otimes 表示残差连接。Figure 5. Schematic diagram of the StarBlock structureNote: \otimes denotes residual connection.在原始YOLOv8n中,卷积层是主要的计算模块[20]。假设在卷积计算过程中输入通道数和输出通道数分别为 C_{in1} 和 C_{out1} ,卷积核大小为 K_{h1}\cdot K_{w1} ,特征图的高度和宽度分别为 H_1 和 W_1 。令传统卷积网络参数量为 m_1 ,计算量为 S_1 ,具体计算如式(3)所示。
\left\{\begin{aligned} & m_1=C_{in1}\cdot C_{out1}\cdot K_{h1}\cdot K_{w1} \\ & S_1=2\times H_1\times W_1\cdot C_{in1}\cdot C_{out1}\cdot K_{h1}\cdot K_{w1} \end{aligned}\right. (3) 以 C_{in2} 和 C_{out2} 分别表示StarBlock的输入通道数和输出通道数,以 H_2 和 W_2 表示特征图的宽和高。StarBlock 的参数量和计算量主要来源于两部分:一是深度可分离卷积,令其卷积核的尺寸为 K_{h2}\cdot K_{w2} ,参数量为 2\times C_{in2}\cdot K_{h2}\cdot K_{w2} ,计算量为 2\times C_{in2}\cdot K_{h2}\cdot K_{w2}\cdot H_2\cdot W_2 。二是全连接层,其参数量为 3\times C_{in2}^2 ,计算量为 3\times C_{in2}^2\cdot H_2\cdot W_2 。基于此,将每层特征提取阶段的参数量和计算量汇总,得出 StarBlock 总的参数量 m_2 和计算量 S_2 ,计算如式(4)所示。
\left\{\begin{aligned} & m_2=2\times C_{in2}\cdot K_{h2}\cdot K_{w2}+3\times C_{in2}^2 \\ & S_2=H_2\cdot W_2\cdot C_{in2}\cdot\left(2\times K_{h2}\cdot K_{w2}+3\times C_{in2}\right) \end{aligned}\right. (4) 由式(3)与式(4)可知,StarBlock由于引入了深度可分离卷积,其参数量与计算量不与输出通道数 C_{out2} 成比例关系,而在传统卷积层计算量与参数量中,输出通道数 C_{out1} 为乘积项,当模型网络结构复杂度增加,通道数较大时,StarBlock在参数量和计算量上相比传统的卷积模块都有较为明显的减少,这使得StarBlock在处理高维特征时拥有了轻量化方面的优势。
然后,本文提出了一种改进的SPPF层,称为SPPF_LSKA,将其放置在主干网络的最后。该模块结合了SPPF和LSKA的优势,通过引入LSKA模块在特征提取方面表现出更强的能力,同时保持了高计算效率。具体来说,SPPF_LSKA是一个增强版的空间金字塔池化层。其设计包括4个主要部分:2个卷积层,3个最大池化层(Maxpool),以及1个大型卷积核空间注意力机制LSKA。在前向传递过程中,输入特征图首先通过1个1×1卷积层将通道数减半。随后,特征图经过3次连续的最大池化操作,生成多尺度特征图。然后,这些特征图被拼接在一起,并通过LSKA进行空间注意力处理,最后通过1个1×1卷积层融合和压缩通道数,生成最终的输出特征图。SPPF_LSKA的主要结构如图6所示。
![]() 图 6 SPPF_LSKA结构示意图注:\oplus 表示特征拼接。Figure 6. Schematic diagram of SPPF_LSKA structureNote: \oplus denotes feature splicing.
图 6 SPPF_LSKA结构示意图注:\oplus 表示特征拼接。Figure 6. Schematic diagram of SPPF_LSKA structureNote: \oplus denotes feature splicing.与原始的SPPF相比,SPPF_LSKA的主要改进在于引入了大型卷积核空间注意力机制LSKA[21]。传统的SPPF仅通过最大池化和卷积操作进行多尺度特征提取,而SPPF_LSKA在此基础上增加了空间注意力模块,能够更好地捕捉全局上下文信息,提高特征图的表示能力。此外,LSKA的大卷积核设计能够有效增强特征图的长距离依赖关系,提高特征提取的质量,从而在目标检测任务中提高检测精度。
2.2.2 颈部网络改进
在颈部网络中,本研究利用C2f_Star替换了传统的C2f模块,在特征提取和网络结构上进行了优化。该模块在设计上与传统C2f模块有差异。C2f_Star引入了StarBlock,由参数n决定引入StarBlock层数(默认为1),其结合了7×7深度可分离卷积和多层感知机结构,通过更有效的特征提取和交互方式来增强特征表达能力。StarBlock模块采用ReLU6激活函数和随机丢弃路径机制,增强了模型的泛化能力和鲁棒性。C2f_Star在保持计算效率的同时,通过复杂化的特征提取和交互方式,提高模型在复杂任务场景下的性能。C2f_Star模块的主要结构如图7所示。
![]() 图 7 C2f_Star结构示意图注:n为StarBlock层数。Figure 7. Schematic diagram of C2f_Star structureNote: n is the number of StarBlock layers.
图 7 C2f_Star结构示意图注:n为StarBlock层数。Figure 7. Schematic diagram of C2f_Star structureNote: n is the number of StarBlock layers.2.2.3 头部网络改进
在头部网络部分,本文设计了一种新型检测头Detect_LSCD,Detect_LSCD是轻量级共享卷积检测头。此检测头通过共享卷积操作提高特征提取的效率,并降低计算成本。首先通过 Conv_GN[22]进行特征处理,之后将特征图输入到1个共享卷积网络(share_conv)中,共享卷积网络由2个串联的Conv_GN组成。随后,特征图通过2个不同的卷积层分别计算边界框回归和分类概率,最终通过scale和DFL(分布式Focal Loss)进行后处理。该设计使得多个检测层之间共享特征,有助于提高检测精度和效率。
输入特征图的高度和宽度分别为 H_3 和 W_3 ,隐藏层通道数为 C_{idc} ,共享卷积层的参数量 S_3 和计算量 m_3 的计算过程如式(5)所示。
\left\{\begin{aligned} & m_3=9C_{idc}^2+C_{idc} \\ & S_3=H_3\cdot W_3\cdot(9C_{idc}^2+C_{idc}) \end{aligned}\right. (5) 而传统检测头中卷积模块包括2个3×3卷积层和1个1×1卷积层,假设输入特征图的高度和宽度分别为 H_4 和 W_4 ,第1层卷积输入通道数为 Cc_1 ,第2层为 Cc_2 ,最大回归值为 R_{\max} ,其参数量 m_4 与计算量 S_4 如式(6)所示。
\left\{\begin{aligned} & m_4=2\times (9Cc_1\cdot Cc_2+9Cc_2^2)+Cc_2\cdot4R_{\max} \\ & S_4=H_4\cdot W_4\cdot\left(18Cc_1\cdot Cc_2+18Cc_2^2+Cc_2\cdot4R_{\max}\right) \end{aligned}\right. (6) 对比式(5)与式(6)的参数量与计算量可知,当通道数近似时,共享卷积层的参数量和计算量的计算式中仅有一项通道数的平方项 C_{idc}^2 ,而传统卷积层因包含多组通道数相乘操作和最大回归值的计算,参数量和计算量较大。传统的检测头通常对每一层特征图分别进行独立处理,而Detect_LSCD通过共享卷积操作,提高了特征提取效率。此外,Detect_LSCD采用了分布式Focal Loss[23],提高了边界框回归的准确性。图8为Detect_LSCD的结构示意图。
2.3 试验环境与参数
本文使用的视觉传感器为Intel D455深度相机。使用的深度学习模型在训练中使用Ubuntu20.04操作系统,32GB内存,NvidiaGeForce RTX3090显卡。试验采用的深度学习框架为Pytorch,在CUDA12.1+Pytorch2.1.0+ Python3.10的开发环境下实现模型搭建及训练测试工作,深度神经网络GPU的加速库为cuDNN8.9.0。在进行试验之前,对部分参数进行了优化,主要包括图像输入尺寸和每批训练样本数量等。本试验将训练轮数(Epoch)设定为150。具体的环境配置和试验所采用的参数如表1所示。系统工作时的识别环境为Windows10操作系统,Intel core i7处理器。最后,将训练好的模型部署到JAKAZU机器人上,进行实际场景测试。
表 1 训练参数设置Table 1. Training parameter setting参数 Parameter 参数值 Value 图像尺度 Images size 640 批数量 Batch size 8 迭代次数 Epoch 150 学习率 Learning rate 0.01 动量 Momentum 0.937 权重衰减次数 Weight_decay 0.0005 2.4 评价指标
本文选用的评价指标包括平均精度均值(mAP)、召回率(R)、推理速度(F)、模型参数总量(m)以及推理过程中的浮点运算数量(FLOPs)、权重文件大小。
平均精度均值是用来衡量目标检测模型精度的指标。当当混淆矩阵IoU阈值为0.5时计算所有类别的AP的平均值,即mAP0.5。召回率为评估目标检测模型能力的重要指标。计算过程如式(7)至式(9)所示。
P=\frac{P_T}{P_T+P_F} \times 100{\text{%}} (7) R=\frac{P_T}{P_T+N_F}\times 100{\text{%}} (8) \mathrm{mAP}=\frac{1}{N}\sum\limits_{{i}=1}^N{AP}_{{i}} \times100\text{%} (9) 式中PT为模型将实际为正类的样本正确预测为正类的数量,PF为模型将实际为负类的样本错误预测为正类的数量。NF实际为正类但模型预测为负类的数量,P表示精确度,APi为第i个类别的平均精度,N为类别数。
推理速度(F)是用来衡量推理速度的指标,表示每秒钟模型可以推理的图像数目。T为推理时间。计算过程如式(10)所示。
F = \frac{{1\;000}}{T} (10) 参数量(m)指的是神经网络模型中所有需要学习的参数的总数。浮点运算数量(FLOPs)表示模型在进行一次前向传播过程中所需的浮点运算次数。
3. 试验与结果分析
3.1 消融试验
为验证本文所提出的YOLOv8n改进方法的有效性,本研究在蝴蝶兰种苗数据集上进行了多组消融试验,对各部分改进的作用及效果进行了全面评估。
表2的数据展示了主干网络、颈部网络和头部网络改进及相互组合后模型性能的变化。主干网络采用的StarNet因其星形结构提升了模型的轻量化表现,模型参数量减少了0.722 M。这一改进有效降低了模型在资源受限设备上的内存占用和计算成本(试验2)。颈部网络改进后的模型在检测精度上表现突出,平均精度均值相比基线模型提升了0.7个百分点,达到了91.1%。这一提升表明颈部网络的改进使模型在细粒度特征表达方面得到增强(试验3)。头部网络改进的效果主要体现在推理速度的提升,改进后推理速度达到352.7帧/s,远高于基线模型,推理速度提升优化了模型在实际应用中的响应效率(试验4)。
表 2 消融试验结果Table 2. Results of ablation experiments试验编号
Test No.主干网络改进
Backbone
improvements颈部网络改进
Neck network
improvements头部网络改进
Head network
improvements平均精度均值
mAP0.5/%参数量
Params/M浮点运算数
FLOPs/G权重文件大小
Weights file size/MB推理速度
Inference speed
FPS/(帧·s−1)1 − − − 90.4 3.006 8.1 6.2 182.3 2 √ − − 90.6 2.284 6.5 4.8 116.2 3 − √ − 91.1 2.806 7.7 5.9 171.2 4 − − √ 89.8 2.362 6.5 4.9 352.7 5 √ √ − 89.6 2.084 6.1 4.4 150.2 6 √ − √ 90.5 1.641 5.0 3.5 390.0 7 − √ √ 90.1 2.162 6.1 4.5 106.0 8 √ √ √ 91.1 1.440 4.6 3.1 435.8 注:√表示使用该模块,-表示不使用该模块,基线模型为YOLOv8n。下同。 Note: √ indicates the use of the module, and - indicates the non use of the module, base model is YOLOv8n. The same below. 主干网络和颈部网络改进相结合后的模型在参数量和计算量上有了明显优化,两个指标均优于单独改进的效果(试验5)。而主干网络及头部网络的结合为模型带来了推理速度上的提升,较二者单独改进分别提升了273.8、37.3帧/s(试验6)。颈部网络与头部网络改进相结合后的权重文件大小较二者单独改进分别降低了1.4、0.4 MB(试验7)。
综合以上改进,YOLOv8n-Aerolite取得了较好的检测性能,检测速度较基线模型提升了253.5帧/s,平均精度均值提升了0.7个百分点,参数量、计算量、权重文件大小均得到了超过30%的优化,更适用于要求严格的自动化生产(试验8)。
3.2 超参数及多种网络对比试验
3.2.1 部分超参数对比
为了获得YOLOv8n-Aerolite的最佳性能,本文对部分超参数进行对比试验,探究超参数变化对模型检测性能的影响。参与对比的超参数包括学习率、动量和权重衰减次数。学习率是影响模型收敛速度和最终性能的关键因素。动量用于加速训练过程,从而提高模型收敛的效率。权重衰减则通过引入正则化项来防止过拟合,促进模型的泛化能力。YOLOv8n模型默认的超参数学习率为0.01,动量为0.937,权重衰减为0.0005,根据默认参数的设置以及模型训练特性,充分考虑了实际任务需求。学习率范围设定为0.005~0.020,是默认值0.010的约2倍,确保覆盖较小学习率对模型稳定性的影响和较大学习率加速收敛的潜力;动量调整为0.920~0.950是基于动量值通常接近1能够加速梯度下降的理论;权重衰减范围设置为
0.0002 ~0.0010 ,目的是通过对比该参数变化的影响来评估模型的稳定性。旨在深入探究不同超参数组合对本模型检测效果的影响,从而确定最优的超参数配置。试验结果如表3所示。表 3 超参数对比试验结果Table 3. Hyper parameter comparison experiment results试验
编号
Test
No.学习率
Learning
rate动量
Momentum权重衰减
Weight_decay平均精度均值
mAP0.5/%推理速度
Inference speed
FPS/(帧·s−1)1 0.005 0.937 0.0005 90.2 367.2 2 0.020 0.937 0.0005 89.4 233.1 3 0.010 0.920 0.0005 91.0 75.6 4 0.010 0.950 0.0005 90.5 79.1 5 0.010 0.937 0.0002 90.3 81.2 6 0.010 0.937 0.0010 90.2 236.4 7 0.010 0.937 0.0005 91.1 435.8 由表3可知,当超参数设置为学习率为0.01、动量为0.937、权重衰减为
0.0005 时,模型在检测精度和稳定性方面表现出最佳性能。这一组合在模型的收敛速度和精度之间达到了良好的平衡,较高的学习率增加了参数更新幅度,有助于加快模型收敛,但未导致明显的过拟合或欠拟合。动量的设置增强了模型训练的稳定性,使其在较长的训练过程中保持对重要梯度信息的敏感性。同时,权重衰减有效限制了过大的权重更新,避免了模型复杂度的无序增长。后续试验与部署将基于此超参数组合,以确保模型在实际应用中具有高效且稳定的表现。3.2.2 主干网络对比
为了研究主干网络变化对于模型轻量化程度、检测精度和推理速度的影响,本研究对比了多种常见的主干网络,对比过程中保持参数一致,试验结果如表4所示。
表 4 主干网络对比试验结果Table 4. Backbone network comparison experiment results由表4可知,Ghostnetv1在精确度、参数量、浮点运算数量以及模型权重文件大小方面接近本文模型,但在推理速度方面FPS仅为90.2帧/s,无法满足实际生产的需求。LSKNet在模型轻量化方面的表现不佳,其中参数量达到了5.051 M,在实际布置时需要较大的算力。RepHGNetV2在精度上表现良好,平均精度均值达到了90.5%,但在推理速度上FPS仅为93.2帧/s,检测速度较慢。RevColNet在参数量上仅有1.433 M,但准确率不及90%,且推理速度较慢。StarNet在多项指标上均表现突出:平均精度均值为91.1%,推理速度提升至435.8帧/s,同时在参数量和浮点运算量上保持轻量化,适合实时性要求较高的场景。这表明,StarNet作为主干网络在确保高精度的同时有效兼顾了轻量化和推理速度的需求,证明了其在实际生产应用中的潜力。
3.2.3 头部网络对比
为了对比不同头部网络对蝴蝶兰种苗各部位的检测效果,本文选取多种类型的检测头对蝴蝶兰种苗进行检测。在其他网络结构一致,参数一致的条件下做出对比,结果如表5所示。
表 5 头部网络对比试验结果Table 5. Head network comparison experiment results头部网络
Head network平均精度均值
mAP0.5/%精度Precsion/% 推理速度
Inference speed
FPS/(帧·s−1)叶片
Blade胚根
Stem黑色块茎
Black tuberDetect_DyHead[28] 90.1 98.4 82.4 89.6 118.6 Detect_AFPN[29] 89.8 97.5 81.9 89.6 72.1 Detect_Aux[30] 89.4 99.2 81.5 87.6 124.8 Detect_Seam[31] 89.5 97.5 89.3 81.7 143.2 Detect_LSCD 91.1 97.1 84.5 91.6 435.8 由表5试验结果可知,Detect_Seam对胚根检测精度最高,但对黑色块茎部位检测的平均精度均值仅为81.7%,这表明其对小目标的检测效果较差,不适用于以黑色块茎为目标的夹取场景。此外,Detect_AFPN和Detect_DyHead的性能表现尽管总体精度较高,但推理速度分别为72.1、118.6帧/s,较低的推理速度限制了其在实时性要求高的任务中的适用性。Detect_Aux的平均精度均值为89.4%,相对较低,且在各方面的检测性能并不突出。
本文提出的Detect_LSCD头部网络在精度和速度上均具备优势,平均精度均值达到了91.1%,黑色块茎部位检测精度达91.6%,检测速度为435.8帧/s。这说明Detect_LSCD设计更适合对蝴蝶兰种苗不同部位的全面检测任务,模型将在实时精确性需求高的场景中表现更为优异。
3.2.4 常见模型对比
为了验证模型在蝴蝶兰种苗检测中整体的优越性,表6对比了当前热门的目标检测模型,包括YOLOv3[32]、YOLOv5[33]、YOLOv6[34]、Faster R-CNN[35]、YOLOv8n、YOLOv8n-ghost、YOLOv5-ShuffleNet和YOLOv9[36]。
表 6 多种模型检测效果对比Table 6. Comparison of detection effect of multiple models模型
Model精度Precsion/% 平均精度均值
mAP0.5/%召回率
Recall/%权重文件大小
Weights file size/MB推理速度
Inference speed
FPS/(帧·s−1)参数量
Params/M浮点运算数量
FLOPs/G叶片
Blade胚根
Stem黑色块茎
Black tuberYOLOv3 97.9 71.3 84.4 84.4 79.5 207.8 122.3 103.732 282.2 YOLOv5 99.2 73.8 83.5 85.5 81.7 5.3 277.3 2.504 7.1 YOLOv6 98.8 71.7 81.8 84.1 80.2 8.7 263.2 4.234 11.8 Faster-RCNN 98.2 73.1 86.9 86.0 58.9 315.1 1.1 41.761 196.7 YOLOv8n 98.7 88.8 83.7 90.4 86.1 6.2 182.3 3.006 8.1 YOLOv8n-ghost 97.6 81.4 88.5 89.2 85.7 3.8 80.6 1.714 5.0 YOLOv5-ShuffleNet 96.9 80.4 75.5 84.3 79.0 3.4 344.8 1.571 4.6 YOLOv9 99.4 70.9 85.7 85.3 84.1 102.8 206.7 45.372 207.9 YOLOv8n-Aerolite 97.3 84.3 91.6 91.1 86.4 3.1 435.8 1.440 4.6 由表6可知,YOLOv3在检测中mAP0.5仅为84.4%,但其参数量高达103.732 M,资源消耗较大;YOLOv5和YOLOv6的模型参数量和浮点运算数量较小,推理速度分别达到277.3、263.2帧/s,但在mAP0.5指标上稍显逊色仅有85.5%和84.1%。Faster-RCNN在检测精度方面表现优异,mAP0.5达86.0%,但作为两阶段检测算法,模型权重文件较大。YOLOv9在精度上表现出色,但其45.372 M的参数量较大,表明其资源需求较高,在边缘设备部署中可能受限。本文在对比试验中也加入了较为广泛使用的YOLOv8n-ghost和YOLOv5-ShuffleNet轻量化模型,YOLOv8n-ghost权重文件大小仅为3.8 MB,参数量1.714 M,轻量化优势明显,但推理速度仅有80.6帧/s,稍显不足。YOLOv5-ShuffleNet进一步减小了参数量和权重文件大小,模型权重文件大小仅有3.4 MB,但其mAP0.5仅有84.3%,在复杂任务中的表现有限。相比之下,YOLOv8n-Aerolite以较小的权重文件大小(3.1 MB)实现了较高的mAP0.5(91.1%)和检测速度(435.8帧/s),在性能与效率上达成平衡,是资源受限场景的理想选择。
如图9所示,常见的轻量化算法YOLOv5-ShuffleNet在样本3的检测中出现了漏检现象未将胚根和黑色块茎部位检出,在样本2中出现错检现象,将空白区域错误检测为了叶片。同样,YOLOv8n-ghost的误检与漏检现象也较为明显,在样本1中出现了对黑色块茎重复检测的问题,在样本2中存在对叶片部位的漏检。相比之下,本文提出的YOLOv8n-Aerolite算法在试验中表现优异,在多个样本上均完成了对蝴蝶兰种苗各部位精确的检测。
![]() 图 9 本模型与主流模型检测效果对比Figure 9. Comparison of detection performance with mainstream models
图 9 本模型与主流模型检测效果对比Figure 9. Comparison of detection performance with mainstream models在实际部署时,模型推理速度至关重要,图像的推理速度决定了机器人抓取种苗的效率。在模型轻量化改进下,机器人在抓取过程中计算过程的参数量以及内存占用量大幅减少,夹取点的计算时间也得到优化,提升了机器人在实际抓取种苗时的效率,降低运算负担。YOLOv8n-Aerolite较高的检测速度和其轻量化程度可以支撑在实际生产中使用资源有限的边缘设备对蝴蝶兰种苗进行快速检测。而对夹取点所在黑色块茎小目标的识别精度提升,表明YOLOv8n-Aerolite算法在蝴蝶兰种苗数据集中的应用更为适宜。
3.3 泛化性试验
为验证模型的泛化能力,本文对比了YOLOv8n-Aerolite和YOLOv8n模型在不同蝴蝶兰种苗数据集上的检测性能。通过3D Max软件对蝴蝶兰种苗进行三维建模,使用KeyShot软件对模型渲染,生成了多种样式的蝴蝶兰种苗模型,并从不同角度采集种苗图像。在模型检测试验中,使用了共计
2168 张蝴蝶兰种苗图像,并按照8:2的比例将数据集划分为训练集和测试集。试验环境和参数配置与2.3节一致,试验结果如表7所示。与YOLOv8n相比,YOLOv8n-Aerolite的mAP0.5和召回率分别提升了1.6和1.4个百分点,检测速度提升了84.8帧/s,在三维重建蝴蝶兰种苗上的检测结果如图10所示,证明YOLOv8n-Aerolite在该数据集上泛化性更好。表 7 三维重建对比试验Table 7. Comparison experiment of three-dimensional reconstruction模型Model 平均精度均值
mAP0.5/%召回率
Recall/%推理速度
Inference speed
FPS/(帧·s−1)YOLOv8n 89.2 84.6 206.4 YOLOv8n-Aerolite 90.8 86.0 291.2 ![]() 图 10 YOLOv8n与YOLOv8n-Aerolite的种苗三维重建结果Figure 10. 3D-reconstructed seedling detection results of YOLOv8n and YOLOv8n-Aerolite
图 10 YOLOv8n与YOLOv8n-Aerolite的种苗三维重建结果Figure 10. 3D-reconstructed seedling detection results of YOLOv8n and YOLOv8n-Aerolite3.4 实际场景的验证与分析
在传统的机器人夹取作业中,通常采用示教再现的方法确定夹取点位置,并通过标定控制对机器人进行操作。然而,这种方法在处理摆放姿态不固定、形状大小不一的蝴蝶兰种苗时存在局限性。由于夹取点位置不固定,传统控制方法的夹取成功率较低,常需人工实时干预以调整夹取位置,降低了操作的快速性与自动化程度。同时,人工调整过程中还依赖可视化程序,增加了对部署设备的计算能力与存储资源的需求。
针对这一问题,本文提出的YOLOv8n-Aerolite模型通过实时视觉检测,可快速适应不同姿态的蝴蝶兰种苗,精确定位夹取点。该方法有效提高了夹取效率与准确性,增强了机器人在复杂工作环境下的自动化水平。此外,YOLOv8n-Aerolite模型权重文件大小仅为3.1 MB,降低了对计算资源的需求,成功实现了计算夹取点算法的轻量化部署。这一改进使得模型不仅具备较高的检测精度,还适合资源受限的设备环境,进一步提升了实际应用中的可操作性。在夹取工作中使用传统的标定控制与部署本模型的结果对比如表8所示。
表 8 标定控制与部署本模文型检测对比Table 8. Comparison of calibration control and deployment of this paper's model detection夹取方案Gripping strategy 夹取成功率Success rate/% 标定控制Calibration control 32 模型部署Model deployment 78 对于本文在实际部署中采用的JAKA_ZU3六自由度机器人在部署时面临实际生产过程中边缘设备处理器计算能力、内存大小及功耗等方面的约束。YOLOv8n-Aerolite模型的轻量化设计使其参数量和模型权重文件大小降低,让模型能够很好地适应硬件限制。此外,该模型在不同硬件平台上的兼容性良好,且其轻量化特性使得在部署到特殊环境或架构的机器人设备时,不需要进一步的模型压缩或量化操作。在存储与通信带宽方面,轻量化模型的权重文件大小减少,这不仅节省了存储空间,还降低了在设备间通信时的带宽消耗,从而提升了整体系统的效率。
为了验证本文提出的方法对在实际夹取时的效果,选取50组蝴蝶兰种苗进行实际夹取试验,用眼在手上方式布置D455相机,利用本文提出的夹取系统对种苗完成检测,识别,夹取等一系列工作。机器人末端金属镊子夹具夹取蝴蝶兰黑色块茎部位成功抬起且姿态良好可用于后续种植即判定为夹取成功。夹取场景如图11所示。
在实际夹取任务中,选取了不同种类的蝴蝶兰种苗进行实际夹取测试。试验共进行了50次,其中成功夹取39次,失败夹取11次,夹取成功率达到了78%。失败夹取的情况包括种苗在夹取过程中掉落或夹取后种苗的姿态不适宜后续种植工作。
4. 结 论
1)本文提出了一种针对算力有限条件下的轻量化蝴蝶兰种苗目标检测算法YOLOv8n-Aerolite,在YOLOv8n基础上,主干网络引入StarNet网络结构和SPPF_LSKA池化层,在颈部网络加入C2f_Star模块,并在头部网络中引入Detect_LSCD检测头,提升了模型检测精度。对种苗各部分的平均检测精度达91.1%,黑色块茎部位检测精度为91.6%,检测速度435.8帧/s,模型权重文件大小为3.1 MB,参数量1.440 M,浮点运算数量4.6 G。在提高模型检测精度的同时,减少了模型的计算复杂度。
2)本研究在三维重建的蝴蝶兰种苗数据集上进行了泛化性试验,YOLOv8n-Aerolite相较于YOLOv8n模型,mAP0.5和检测速度分别提高了1.6个百分点和84.8帧/s,证明了该方法在其他类似的小目标检测中具有广泛适用性。
3)将YOLOv8n-Aerolite模型部署到边缘设备在实际场景中执行蝴蝶兰种苗检测工作,配合机器人完成夹取任务,在实际夹取过程中成功率达78%。保证后续种植过程的顺利实施。本研究结果可为发展小型作物自动化快速繁育技术提供参考。
-
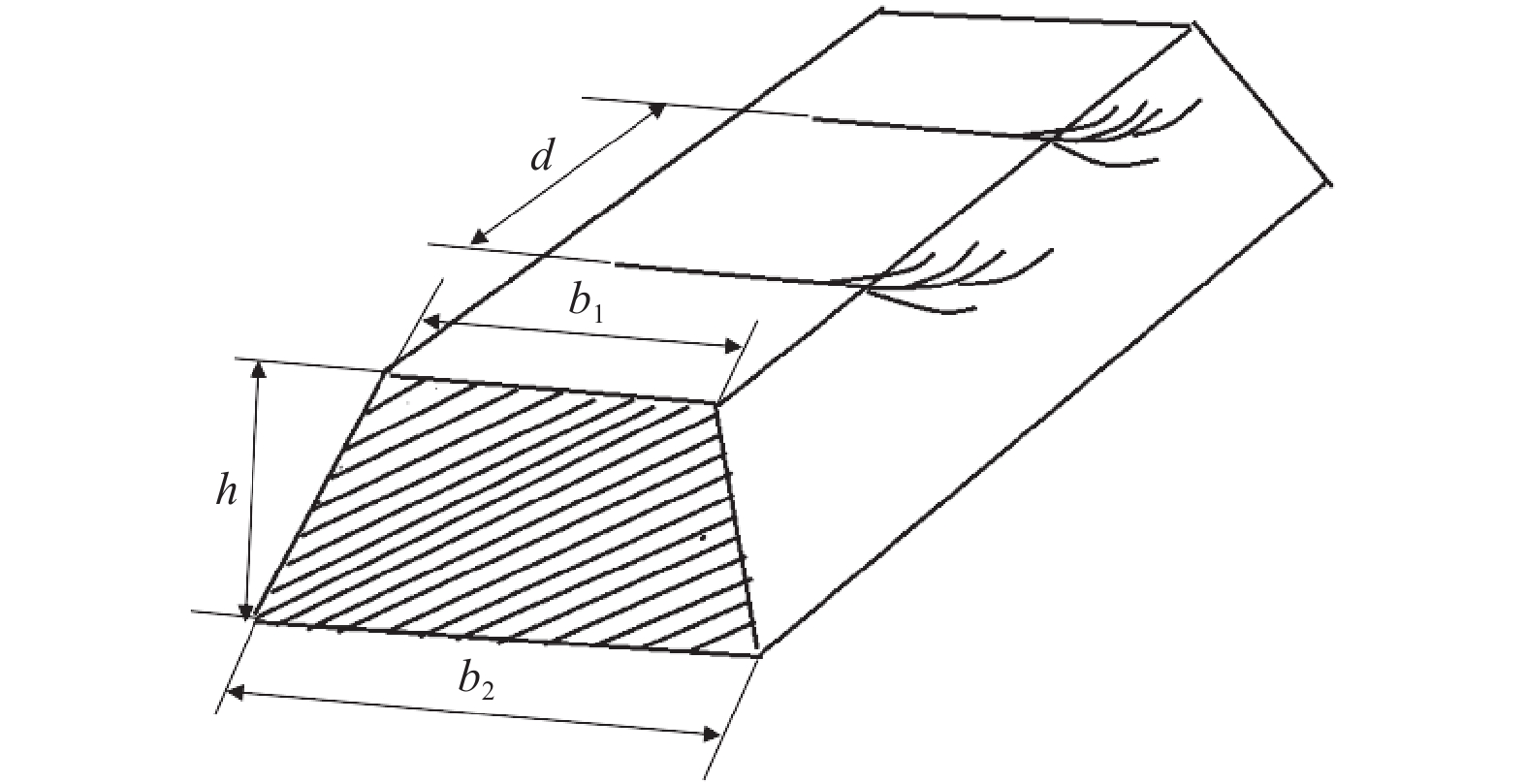
![]()
图 1 甘薯横向水平栽插及薯垄尺寸示意图
注:d为株距,mm;b1为垄顶宽,mm;b2为垄底宽,mm;h为垄高,mm。
Figure 1. Schematic diagram of horizontal planting and ridge size of sweet potatoes
Note: d is row spacing, mm; b1 is width of ridge top, mm; b2 is width of ridge bottom, mm; h is height of ridge, mm.
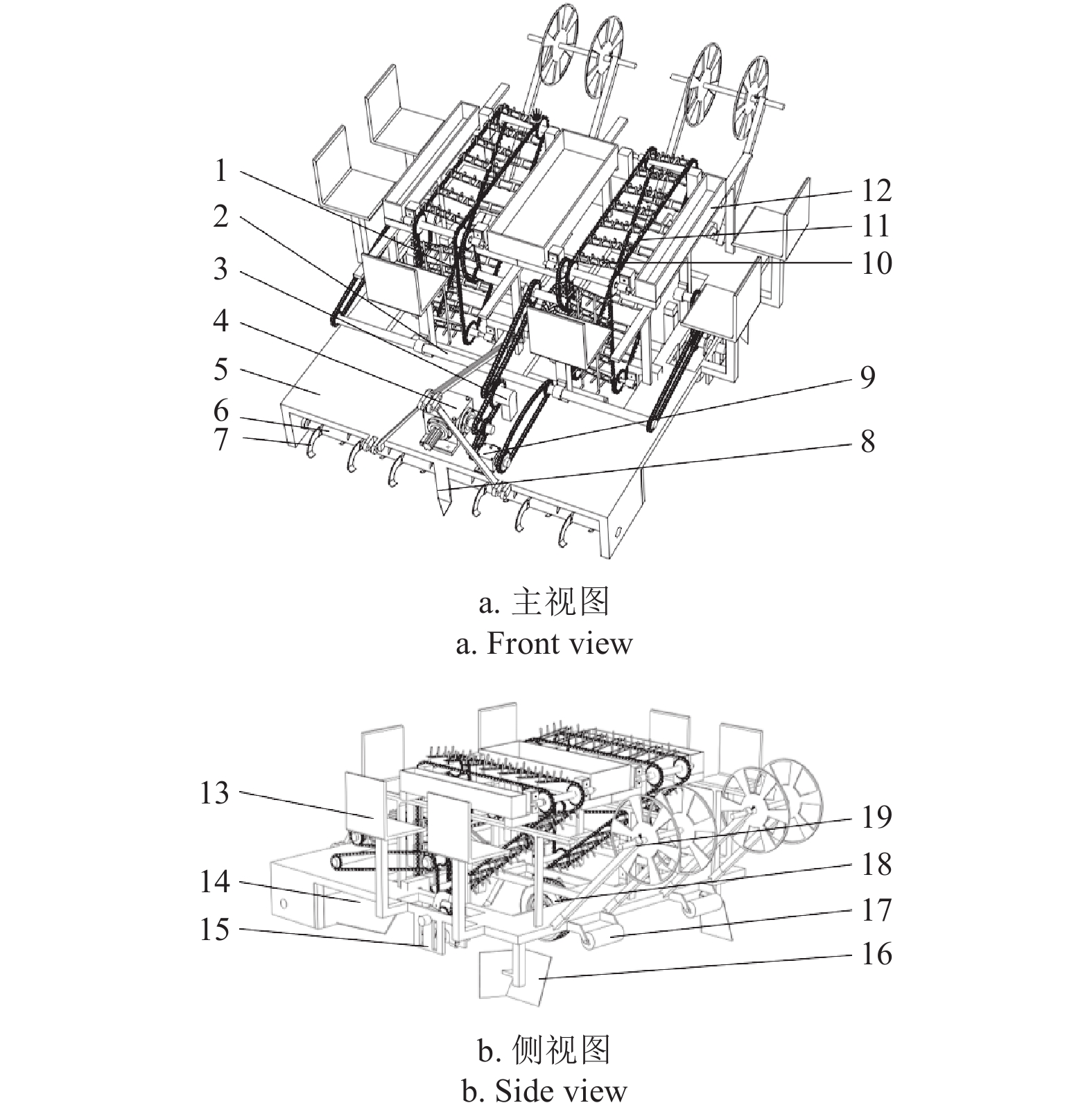
![]()
图 2 甘薯横向水平复式移栽机结构图
1.整机后轴 2.整机中轴 3.整机前轴 4.变速箱 5.机架 6.旋耕轴 7.旋耕刀 8.开沟器9.减速器 10.栽苗爪 11.栽苗装置链条 12.苗箱 13.座椅 14.垄面刮土板 15.上土机16.覆土板17.压土轮18.地轮19.滴灌带架
Figure 2. Structure diagram of sweet potato horizontal multiple transplanter
1.Rear axle of the entire machine 2.Central shaft of the entire machine 3.Front axle of the entire machine 4. Transmission 5. Rack 6. Rotary tiller shaft 7. Rotary blade 8. Furrower 9. Reducer 10. Planting claw 11. Seedling planting device chain 12. Seedling box 13. Seat 14. Ridge surface scraper 15. Earth moving machine 16. Soil cover board 17. Press wheel 18. Land wheel 19. Drip irrigation belt rack
![]()
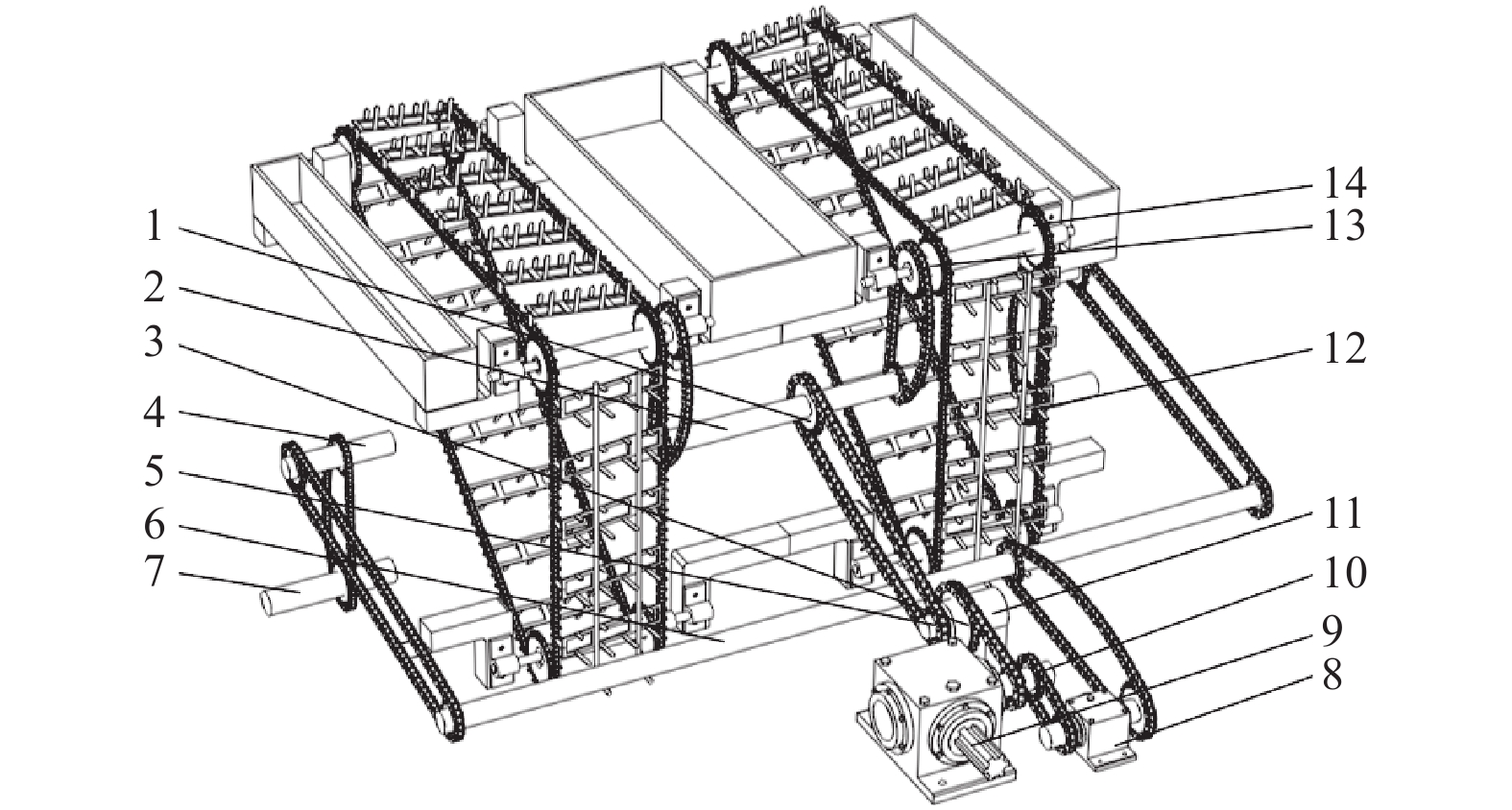
图 3 动力传递路线
1.整机后轴链轮1 2.整机后轴 3.整机前轴链轮1 4.整机上轴 5.整机前轴链轮2 6.整机中轴 7.上土机轴 8.减速器 9.变速箱 10.变速箱输出轴链轮1 11.整机前轴 12.整机后轴链轮2 13.栽苗装置链轮1 14.栽苗装置链轮2
Figure 3. Power transmission route
1.Rear axle gear 1 of the entire machine1 2.Rear axle of the entire machine 3.Front axle gear 1 of the entire machine 4.Upper shaft of the entire machine 5.Front axle gear 2 of the entire machine 6.Central axis of the entire machine 7.Upper soil machine shaft 8.Reducer 9.Transmission 10.Transmission output shaft gear 1 11.Front axle of the entire machine 12.Rear axle gear 2 of the entire machine 13.Planting device gear 1 14.Planting device gear 2
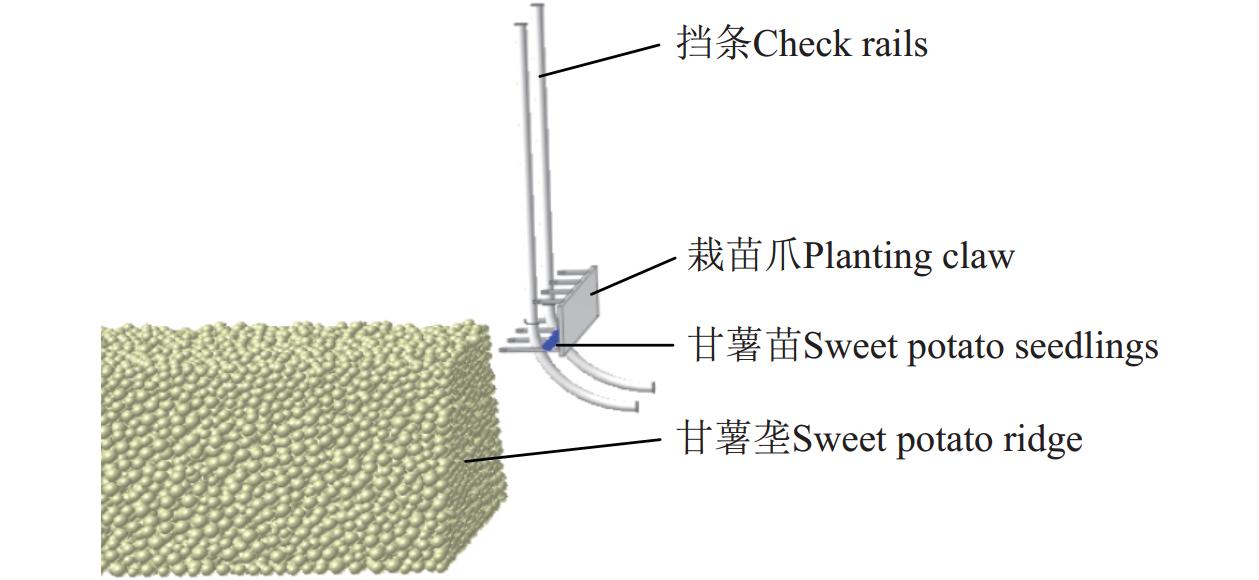
![]()
图 4 甘薯苗栽植运动示意图
1.栽苗装置链轮2 2.甘薯苗 3.挡条 4.甘薯垄 5.链条 6.栽苗爪1. Planting device gear 2 2. Sweet potato seedlings 3. Check rails 4. Sweet potato ridge 5. Chain 6. Planting claw注:a为栽苗爪宽度,mm;b为栽苗爪长度,mm;c为栽苗爪高度,mm;AB为喂苗段;BC为运送下降段;CD为甘薯苗栽插段;E为甘薯苗重心;F为栽苗爪前爪端点;O为坐标原点;va为机器前进速度,m·s−1;ω为栽苗装置链轮转动角速度,rad·s−1;vb为链条前进速度,m·s−1;r为栽苗装置链轮2齿顶圆半径,mm;hi为入土深度,mm;hz为甘薯苗栽植深度,mm;ri为E点在相对圆周运动中的回转半径,mm;rz为F点回转半径,mm;L为栽苗爪间距,mm。
Figure 4. Schematic diagram of sweet potato seedling planting movement
Note:a is width of planting claw, mm; b is length of planting claw, mm; c is height of planting claw, mm; AB is feeding seedling section; BC is conveying descent section; CD is the transplantation of sweet potato seedling section; E is center point of sweet potato seedling gravity; F is the front endpoint of seedling claw; O is the coordinate origin; va is the forward speed of the machine, m·s−1; ω is the rotational angular velocity of the sprocket of the seedling planting device, rad·s−1; vb is the chain movement speed, m·s−1; r is the radius of the top circle of the sprocket 2 teeth of the seedling planting device, mm; hi is the depth of penetration into the soil, mm; hz is the planting depth of sweet potato seedling, mm; ri is radius of gyration for center point E of sweet potato seedling gravity in relative motion, mm; rz is the radius of rotation at point F, mm;L is the spacing between planting claws, mm.
![]()
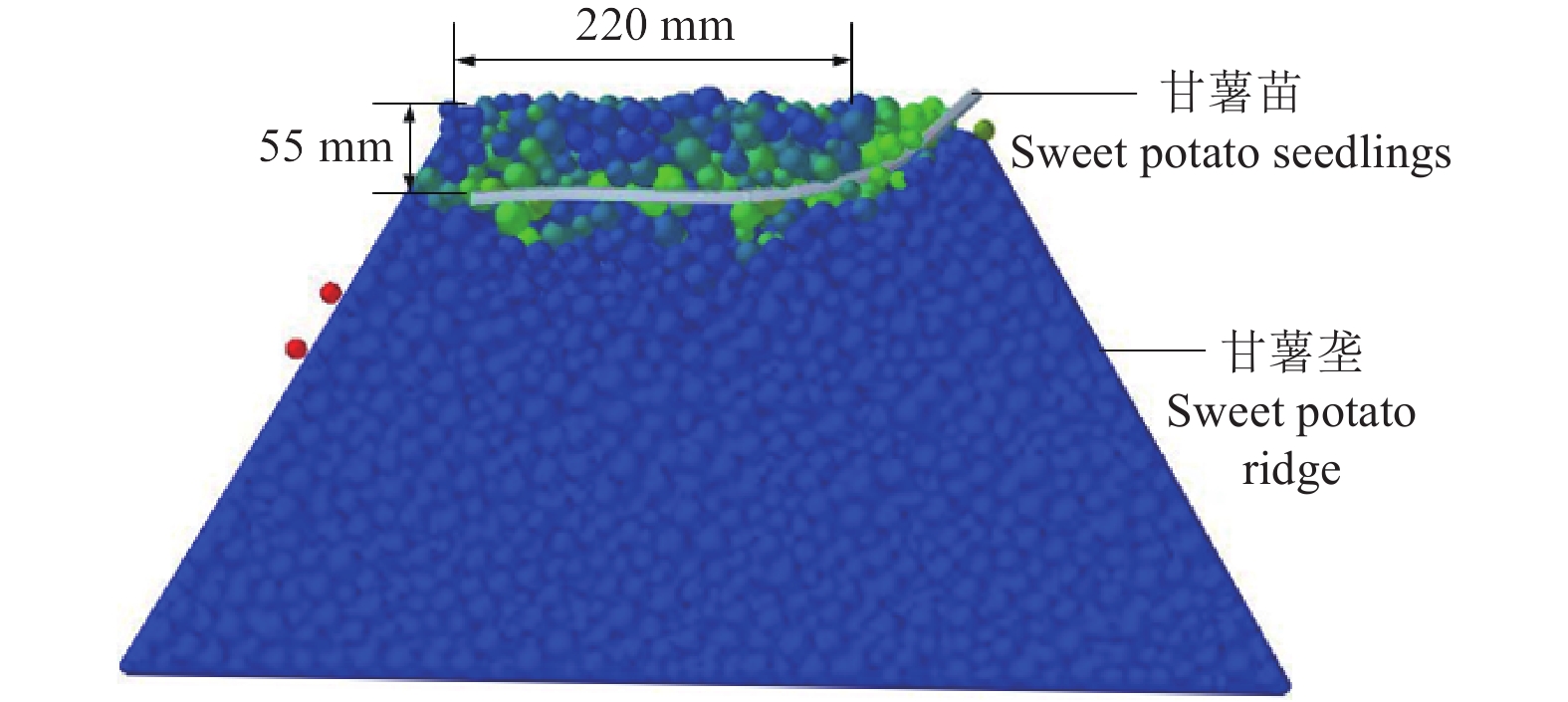
图 6 栽苗装置-柔性甘薯苗-甘薯垄耦合作用模型
Figure 6. Planting device - flexible sweet potato seedlings - sweet potato ridge coupling effect model
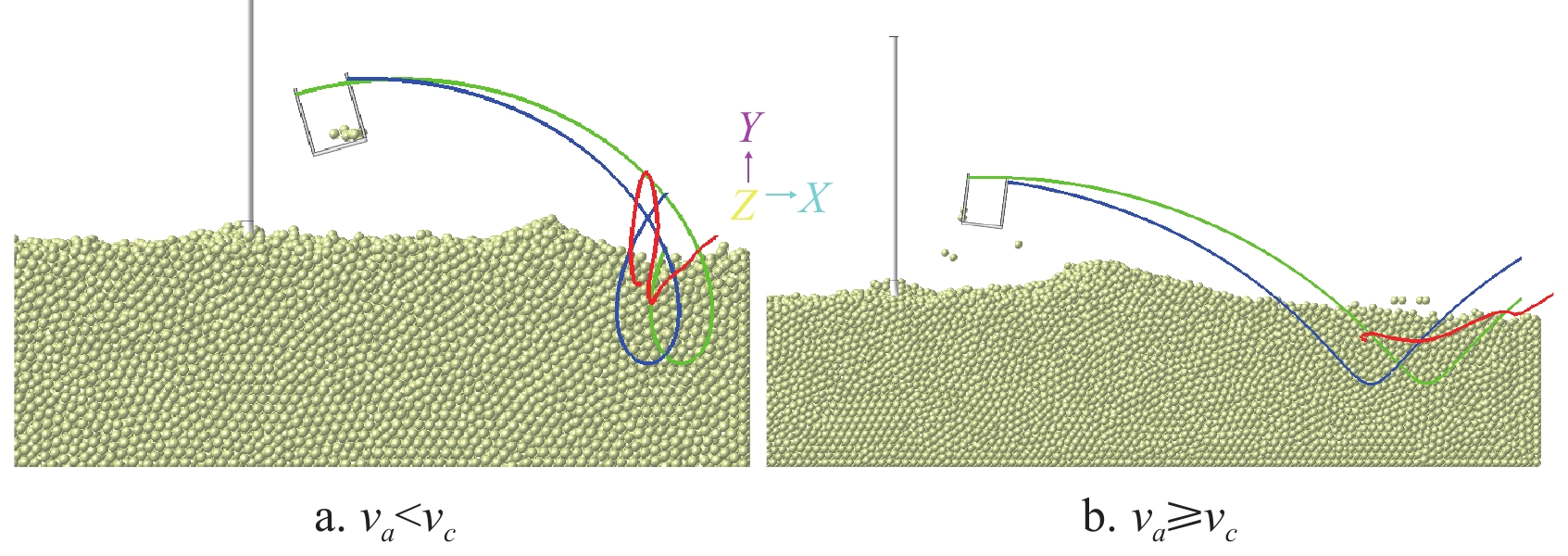
![]()
图 7 栽苗爪及薯苗运动轨迹
注:蓝色线为栽苗爪前爪前端移动轨迹;绿色线为栽苗爪后爪前端移动轨迹;红色线为甘薯苗重心移动轨迹;vc为前后栽苗爪端点速度,m·s−1。
Figure 7. Planting claws and movement trajectory of potato seedlings
Note: The blue line represents the movement trajectory of the front end of the seedling front claw; The green line represents the movement trajectory of the front end of the seedling rear claw; The red line represents the movement trajectory of potato seedlings; vc is the endpoint speed of the front and rear seedling claws, m·s−1.
![]()
图 8 栽苗爪高度对栽植深度合格率的影响
Figure 8. The influence of seedling claw height on qualified rate of planting depth
![]()
图 10 甘薯横向水平复式移栽机田间试验
Figure 10. Field experiment of sweet potato horizontal multiple transplanter
表 1 移栽机主要技术参数
Table 1 Main technical parameters of transplanting machine
参数 Parameters 数值 Value 配套动力Auxiliary power /kW 73.5 外形尺寸External dimensions/mm×mm×mm 1020×2056×1152 作业幅宽Working width/mm 1800 作业行数Number of working lines 2 栽插深度Planting depth /mm 50~60 株距Row spacing/mm 160~220 移栽效率Transplantation efficiency /(plants·min−1) >250  下载: 导出CSV
下载: 导出CSV
表 2 仿真模型参数
Table 2 Simulation model parameters
材料属性
Material property参数
parameter数值
Numerical value土壤颗粒
Soil particles密度/(kg·m−3) 2.61×103 颗粒直径/mm 1~5 泊松比 0.4 剪切模量/Pa 1.09×106 栽苗爪
Planting claw密度/(kg·m−3) 7.801×103 泊松比 0.29 杨氏模量/Pa 2.07×1011 薯苗
Potato seedling密度/(kg·m−3) 1.62×103 泊松比 0.25 剪切模量/Pa 4.36×106 土壤颗粒间
Interactions between soil particles碰撞恢复系数 0.2 动摩擦系数 0.3 静摩擦系数 0.4 土壤与薯苗间
Between soil and potato seedlings碰撞恢复系数 0.5 动摩擦系数 0.7 静摩擦系数 0.8 土壤与栽苗爪间
Between soil and seedling claws碰撞恢复系数 0.5 动摩擦系数 0.3 静摩擦系数 0.5 栽苗爪与薯苗间
Between planting claw
and potato seedlings碰撞恢复系数 0.4 动摩擦系数 0.4 静摩擦系数 0.5
下载: 导出CSV
表 3 试验因素和水平
Table 3 Test factors and levels
水平
Levels机器前进速度
Machine forward
speed X1 /(m·s−1)链条前进速度
Chain forward
speed X2/ (m·s−1)入土深度
Embedded depth
X3/ mm−1 0.3 0.15 40 0 0.4 0.20 45 1 0.5 0.25 50
下载: 导出CSV
表 4 试验方案与结果
Table 4 Test scheme and results
序号
No.x1 x2 x3 栽植深度合格率
Qualified rate of
planting depth Y1
/%栽植株距合格率
Qualified rate of
planting spacing Y2/%移栽效率
Transplantation
efficiency Y3
/(plants·min−1)1 1 1 0 92 84 332 2 0 0 0 96 88 262 3 1 0 1 82 90 326 4 0 0 0 94 90 264 5 0 1 1 88 92 268 6 −1 1 0 94 86 212 7 −1 −1 0 96 96 188 8 0 0 0 94 92 256 9 0 0 0 96 86 258 10 −1 0 1 90 94 200 11 −1 0 −1 86 92 202 12 1 −1 0 90 90 306 13 0 0 0 94 90 256 14 0 1 −1 84 88 270 15 0 −1 −1 90 92 252 16 1 0 −1 80 86 324 17 0 −1 1 88 96 246 注:x1、x2、x3分别为X1、X2和X3的水平值。 Note: x1, x2and x3 are the level values of X1、X2 and X3.
下载: 导出CSV
表 5 各因素对试验指标影响显著性
Table 5 The significance of the impact of various factors on experimental indicators
方差来源
SourceP值(Y1)
P valueP值(Y2)
P valueP值(Y3)
P value模型Model 0.0004** 0.00331** <0.0001** x1 0.0013** 0.0177* <0.0001** x2 0.3779 0.0045** <0.0001** x3 0.2008 0.0475* 0.4457 x1x2 0.2248 0.3647 0.7834 x1x3 0.5270 0.6427 0.5857 x2x3 0.0324* 1.0000 0.5857 x12 0.0218* 0.4259 0.2480 x22 0.6472 0.5386 0.3142 x32 <0.0001** 0.0698 0.3657 失拟项Lack of fit 0.1544 0.6603 0.5413 注:**为极显著,P<0.01;*为显著,P<0.05。 Note:** indicates that the impact is extremely significant, P<0.01; * indicates that the impact is significant, P<0.05.
下载: 导出CSV
-
[1] 谢一芝,边小峰,贾赵东,等. 中国鲜食甘薯产业发展现状及其发展前景[J]. 江苏农业学报,2022,38(6):1694-1701. XIE Yizhi, BIAN Xiaofeng, JIA Zhaodong, et al. Development status and prospect of fresh sweet potato industry in China[J]. Jiangsu Journal of Agricultural Sciences, 2022, 38(6): 1694-1701. (in Chinese with English abstract)
[2] 鲍国丞,王公仆,胡良龙,等. 甘薯联合收获机高度自适应集薯装置设计与优化[J]. 农业工程学报,2023,39(2):24-33. BAO Guocheng, WANG Gongpu, HU Lianglong, et al. Design and optimization of the height self-adjusting device for sweet potato combined harvesters[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2023, 39(2): 24-33. (in Chinese with English abstract)
[3] 赵海,刘新鑫,潘志国,等. 甘薯种植农艺及机械化种植技术研究[J]. 中国农机化学报,2021,42(6):21-26. ZHAO Hai, LIU Xinxin, PAN Zhiguo, et al. Agronomic characteristics and mechanized planting technology of sweet popato [J].Chinese Journal of Agricultural Mechanization, 2021, 42(6): 21-26. (in Chinese with English abstract)
[4] 李慧,何腾飞,刘虎,等. 丘陵山地甘薯膜上仿形扦插移栽机研制[J]. 农业工程学报,2023,39(16):26-35. LI Hui, HE Tengfei, LIU Hu, et al. Development of the profiling up-film transplanter for sweet potato in hilly and mountainous region[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(16): 26-35. (in Chinese with English abstract)
[5] 胡良龙,计福来,王冰,等. 国内甘薯机械移栽技术发展动态[J]. 中国农机化学报,2015,36(3):289-291,317. HU Lianglong, JI Fulai, WANG Bing, et al. Development of mechanical transplanting technology of sweet potato in China[J]. Chinese Journal of Agricultural Mechanization, 2015, 36(3): 289-291, 317. (in Chinese with English abstract)
[6] YANG Q Z, XU L, SHI X Y, et al. Design of seedlings separation device with reciprocating movement seedling cups and its controlling system of the full-automatic plug seedling transplanter[J]. Computers and Electronics in Agriculture, 2018, 147: 131-145. doi: 10.1016/j.compag.2018.02.004
[7] 严伟,张文毅,胡敏娟,等. 国内外甘薯种植机械化研究现状及展望[J]. 中国农机化学报,2018,39(2):12-16. YAN Wei, ZHANG Wenyi, HU Minjuan, et al. Present situation of research and expectation on plant mechanization of sweet potato in China and abroad[J]. Chinese Journal of Agricultural Mechanization, 2018, 39(2): 12-16. (in Chinese with English abstract)
[8] Carlos E P, Valter C A, Rosana C P, et al. Yield and quality of wilted sweet potato vines and its silages[J]. Horticultura Brasileira, 2015, 33(3): 283-289. doi: 10.1590/S0102-053620150000300002
[9] 范泽民,陈卫,刘新亮,等. 压苗式甘薯移栽机研制探讨[J]. 中国农机化学报,2018,39(11):1-3,16 . FAN Zemin, CHEN Wei, LIU Xinliang, et al. Discussion on transplanting machine of sweet potato by pressurizing seedlings [J]. Chinese Journal of Agricultural Mechanization, 2018, 39(11): 1-3,16. (in Chinese with English abstract)
[10] 吴旋,申屠留芳,刘涵,等. 甘薯盘夹式移栽机设计与试验[J]. 农机化研究,2022,44(11):107-112. WU Xuan, SHENTU Liufang, LIU Han, et al. Design of sweet potato tray clamping transplanter[J]. Journal of Agricultural Mechanization Research, 2022, 44(11): 107-112. (in Chinese with English abstract)
[11] 胡良龙,王冰,王公仆,等. 2ZGF-2型甘薯复式栽植机的设计与试验[J]. 农业工程学报,2016,32(10):8-16. HU Lianglong, WANG Bing, WANG Gongpu, et al. Design and experiment of 2ZGF-2 compound planting machinefor sweet potato[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(10): 8-16. (in Chinese with English abstract)
[12] 张涛. 基于“船底形”位姿的甘薯裸苗膜上移栽装置设计与试验[D]. 泰安:山东农业大学,2021. ZHANG Tao. Design and experiment of transplanting device for naked sweet potato seedlings on film based on "boat shape" posture[D]. Tai'an Shandong Agricultural University, 2021. (in Chinese with English abstract)
[13] 庄如月. 甘薯裸苗移栽机构优化设计与试验研究[D]. 杭州:浙江理工大学,2021. ZHUANG Ruyue. Optimization Design and Experimental Study on Transplating Mechanism of Sweet Potato Seed Seedlings[D]. Hangzhou: Zhejiang Sci-Tech University, 2021. (in Chinese with English abstract)
[14] 刘正铎. 机械臂式甘薯移栽机关键技术与移栽机理研究[D]. 泰安:山东农业大学,2022. LIU Zhengduo. Key technology and Transplanting Mechanism of Sweet Potato Transplanter with Mechanical Arm[D]. Tai'an: Shandong Agricultural University, 2022. (in Chinese with English abstract)
[15] 武广伟,安晓飞,颜丙新,等. 基于预处理苗带甘薯裸苗自动移栽机设计与试验[J]. 农业机械学报,2022,53(增刊1):99-109. WU Guangwei, AN Xiaofei, YAN Bingxin, et al. Design and experiment of automatic transplanter for sweet potato naked seedlings based on pretreatment seedling belt[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(Supp.1): 99-109. (in Chinese with English abstract)
[16] 何宇凡,丛岳,颜丙新,等. 基于挠性圆盘的甘薯裸苗类水平栽植运动分析与试验[J]. 中国农业大学学报,2022,27(11):187-196. HE Yufan, CONG Yue, YAN Bingxin, et al. Kinematics analysis and experiment of horizontal planting of sweet potato naked seedlings based on flexible disc[J]. Journal of China Agricultural University, 2022, 27(11): 187-196. (in Chinese with English abstract)
[17] 宋佳乐,刘洋洋,司增志,等. 不同栽培密度对甘薯农艺性状与产量的影响[J]. 江西农业学报,2022,34(12):27-32. doi: 10.19386/j.cnki.jxnyxb.2022.12.005 SONG Jiale, LIU Yangyang, SI Zengzhi, et al. Effects of different planting densities on agronomic traits and yield of sweet potato[J]. Acta Agriculturae Jiangxi, 2022, 34(12): 27-32. (in Chinese with English abstract) doi: 10.19386/j.cnki.jxnyxb.2022.12.005
[18] 曹辉,王峰,左红娟,等. 栽培措施对甘薯生长和产量的影响[J]. 陕西农业科学,2022,68(11):13-17. CAO Hui, WANG Feng, ZUO Hongjuan, et al. Effect of cultivation measures on growth and yied of sweet potato[J]. Shaanxi Journal of Agricultural Sciences, 2022, 68(11): 13-17. (in Chinese with English abstract)
[19] 马代夫,鄂文弟. 甘薯绿色轻简化栽培技术手册 [M]. 北京:中国农业出版社,2021. [20] 穆桂脂,吕皓玉,张婷婷,等. 甘薯秧回收机抛送装置气固耦合模拟与试验优化[J]. 农业机械学报,2021,52(10):213-222. MU Guizhi, LV Haoyu, ZHANG Tingting, et al. Gas-solid coupling simulation and experimental optimization of throwing device of sweet potato seedling recycling machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(10): 213-222. (in Chinese with English abstract)
[21] 牛丛,徐丽明,马帅,等. 沟栽葡萄防寒布覆土卧式刷辊清除装置设计与试验[J]. 农业工程学报,2021,37(23):301-306. NIU Cong, XU Liming, MA Shuai, et al. Design and experiment of the horizontal brush roll soil clearing device for covering soil above the cold-proof cloth of furrow planting grape[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2021, 37(23): 301-306. (in Chinese with English abstract)
[22] 牛丛,徐丽明,闫成功,等. 基于基于局部建模方法的卧式柔性清土辊性能优化[J]. 农业工程学报,2023,39(1):50-59. NIU Cong, XU Liming, YAN Chenggong, et al. Optimization of the performance of the horizontal flexible soil-clearing roller using partial modeling[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2023, 39(1): 50-59. (in Chinese with English abstract)
[23] 胡乔磊,王磊,李心志,等. 油菜基质块苗移栽机对辊式取苗装置设计与试验[J]. 农业工程学报,2022,38(9):12-23. HU Qiaolei, WANG Lei, LI Xinzhi, et al. Design and experiment of the counter roll seedling taking equipment for rapeseed substrate block seedlings transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(9): 12-23. (in Chinese with English abstract)
-
期刊类型引用(1)
1. 赵晨阳,刘汉涛,李世民,丁伟. 基于PLC的太阳能干燥系统及其远程监控系统设计. 自动化与仪器仪表. 2025(03): 187-191 .  百度学术
百度学术
其他类型引用(3)
















计量
- 文章访问数: 377
- HTML全文浏览量: 64
- PDF下载量: 198
- 被引次数: 4





