
Dynamic path planning for feeding boat in crab pond using FIA*-APF algorithm
-
摘要:
为了提高无人投饵船在含障碍物河蟹养殖池塘自主巡航的作业效率和安全性,该研究提出基于改进A*算法与人工势场法相融合(fusion of improved A* and artificial potential field,FIA*-APF)的蟹塘投饵船动态路径规划算法。首先引入动态加权因子优化A*算法评价函数;其次加入转折惩罚函数并删除冗余点,接着利用B样条曲线对全局路径进行平滑处理;最后将改进A*算法得到的全局路径作为改进人工势场法中的引力路径,生成投饵船自主巡航高效路径。根据养殖池塘创建静态和动态2种仿真环境,分别对传统人工势场法(traditional artificial potential field,TAPF)、基于A*和人工势场法的融合算法(the A* and artificial potential field,TA*-APF)和FIA*-APF算法的性能进行20次测试。仿真试验结果表明:2种环境下,FIA*-APF算法的平均规划时间是TAPF算法的17.23%,是TA*-APF算法的51.96%,平均指令节点数量比TAPF算法减少50.64%,比TA*-APF算法减少65.03%,平均路径长度比TA*-APF算法减少2.82%。蟹塘试验结果表明:FIA*-APF算法的规划时间为TAPF算法的38.16%,为TA*-APF的62.42%,路径长度比TAPF算法减少29.13%,比TA*-APF减少10.15%;另外,TAPF和TA*-APF算法规划路径上大于60°的转角分别是FIA*-APF算法的3.28和2.62倍,大于100°的转角分别是FIA*-APF算法的3.73和1.67倍,该研究算法规划的路径更高效平滑。研究结果可为无人投饵船自主导航提供参考。
Abstract:Most of the crabs are fed manually at present in China. However, manual feeding cannot fully meet the industrial requirements of mass production, particularly with an increasingly aging labor force. Fortunately, automatic navigation can be expected to promote the development of unmanned feeding boats. This study aims to realize the real-time path planning of an unmanned feeding boat in a crab pond environment with static and dynamic obstacles. A dynamic path planning was proposed for the unmanned feeding boat using the fusion of the improved A* and the artificial potential field (FIA*-APF). Better performance was achieved to solve the excessive turning points, large path curvature, and numerous redundant points in the traditional A* path planning. Firstly, the evaluation function was optimized to find the end of the path. Then, the turn penalty function was introduced to remove the redundant points for the smaller number of turning points. The path was then smoothed using a B-spline curve. Finally, the gravitational and repulsive functions of the artificial potential field were improved to obtain the global paths using the improved A*. The gravitational paths were used to treat the local optimization and unreachability in the artificial potential field. Two aquaculture pond environments with static and dynamic obstacles were established to evaluate the performance of the traditional artificial potential field (TAPF) , the fusion with the A* and artificial potential field (TA*-APF), as well as the FIA*-APF. Planning speed, number of nodes and path length were selected as the evaluating indicators. Each experiment was carried out 20 times in every single environment. The simulation results showed that the average planning time in the two environments was 17.23% and 51.96%, respectively, compared with the TAPF and the TA*-APFs. Furthermore, the average node numbers were 50.64% and 65.03% less than that, respectively. The average path length was 2.82% less than the TA*-APF. The results of 10 crab pond tests showed that the planning time was only 38.16% and 62.42% of the TAPF and the TA*-APFs, respectively. The average path lengths were 29.13% and 10.15% less than that, respectively. In addition, the TAPF and TA*-APFs planned paths with corners greater than 60° were 3.28 and 2.62 times greater than FIA*-APF, while the corners greater than 100° were 3.73 and 1.67 times greater than FIA*-APF, respectively. The path planned was safer and smoother after optimization. The finding can provide a sound reference for the navigation development in unmanned feeding boats.
-
Keywords:
- unmanned feeding boat /
- algorithms /
- navigation /
- path planning /
- A* algorithm /
- APF /
- dynamic obstacle
-
0. 引 言
新疆地处西北内陆干旱区,降雨量稀少,蒸发量大,如何高效利用水资源,已成为新疆农业发展考虑的首要问题[1]。滴灌可以提高水分利用效率,自20世纪80年代引进以来,得到广泛推广[2]。地膜覆盖具有增温、保墒、抑制植株棵间蒸发、提高作物产量等功能[3]。在20世纪90年代开始在玛纳斯河流域将覆膜与滴灌结合起来进行尝试取得显著成果,膜下滴灌开始推广并得到长足的发展,新疆膜下滴灌棉花种植面积不断攀升,至今新疆地区膜下滴灌棉花种植面积占全国植棉面积82.76%,棉花产量占全国棉花产量的85.76%,是中国主要的棉花产区[4-5]。但随耕地面积增长,淡水资源匮乏制约着新疆农业的发展,亟需替代的灌溉水资源。在干旱半干旱地区利用微咸水进行灌溉,可以缓解淡水资源供需矛盾,新疆微咸水资源丰富,新疆微咸水天然补给量占西北内陆区微咸水天然补给量57.60%,地下水资源丰富,地下咸水分布面积23.3万~26.7万 hm2,含盐量在3~30 g/L之间,可开发的微咸水、咸水资源量为每年17.24亿 m3[6-10]。
微咸水灌溉在干旱缺水地区越来越受到重视,国内外学者进行了大量研究。ISKENDEROV等[11]在阿塞拜疆研究表明矿化度为5~6 g/L的咸水可用于棉花灌溉;刘冉等[12]发现灌溉水电导率升高对棉花幼苗根系有一定的抑制作用;江柱等[13]研究表明棉株各器官养分量和单株积累量随灌溉水矿化度的增大呈降低趋势;郭仁松等[14]发现在盛花期前用矿化度小于3 g/L的微咸水灌溉不影响棉花产量;郑春莲等[15]发现矿化度2~4 g/L微咸水灌溉对籽棉产量无显著影响;王泽林等[16]研究发现综合条件下小于6 g/L灌水矿化度不影响棉花产量;刘雪艳等[17]在南疆地区发现矿化度为2.36~3.39 g/L时,棉株体内盐分累计较低,对养分的吸收及棉花品质影响最小。综上,适宜的微咸水灌溉对棉花产量并不会造成大的影响,因此在淡水资源匮乏的地区常用微咸水进行农业灌溉,节约了水资源,有利于绿洲农业的可持续生产。
新疆农业是典型的绿洲农业,随机械化的发展,人工绿洲面积不断增长,由于边缘绿洲区农田开垦利用年限的不同,土壤性状在小区域尺度存在高度的变异性[18-19]。而玛纳斯河流域是新疆开垦面积最大的人工绿洲,更是新疆维吾尔自治区最重要的粮、棉、糖生产基地之一。玛纳斯河流域土壤质地主要为砂土和壤土[20]。土壤质地与植株的产量品质密切相关。大量学者针对不同土壤质地下植株生长进行了大量研究。熊杰等[21]研究发现玉米产量在砂质黏壤土最高,砂质壤土次之,砂土最低;贾立华等[22]研究发现花生荚果产量、籽仁产量及有效果数呈现壤土大于砂土大于黏土的规律;曲杰等[23]发现膜下滴灌条件下,砂壤土和壤土更加有利于花生荚果体积增长,黏土则限制了花生荚果膨大;史普想等[24]研究发现花生荚果产量、子仁产量和有效果数均表现为壤土最大、砂土次之、黏土最小;刘芳婷等[25]研究表明不同生育期棉花壤土和砂土的土壤CO2浓度具有明显的差异,整体呈现出“上升-下降”的趋势;冯棣等[26]研究发现中壤土和重壤土相较于砂壤土更适合于棉花咸水造墒播种;王萌萌等[27]发现壤土中棉花的植株综合生长指标最好;张泽等[28]研究发现壤土棉花根系分布均匀度优于砂、黏土。过往研究常聚焦于单一土壤质地微咸水对棉花产量品质的影响,几乎没有考虑到不同土壤质地下微咸水灌溉是否对植株盐害程度存在差异。因此,本研究通过开展桶栽试验,探索不同土壤质地条件下灌水矿化度对棉花生理生长及产量品质的影响,明确不同土壤质地下最合理的灌水矿化度,以期为玛纳斯河流域不同土质棉田合理利用微咸水资源提供理论依据与技术支撑。
1. 材料和方法
1.1 试验区概况
试验于2022年4—9月新疆生产建设兵团农八师石河子市石河子大学节水试验站(85°59'47″E,44°19'28″N)进行。试验站海拔412 m,平均地面坡度为0.6%。平均年日照时数为2 865 h。平均年降雨量为198 mm,平均年蒸发量为1 340 mm,大于10 ℃积温为3 463.5 ℃,大于15 ℃积温为2 960.0 ℃,无霜期170 d,年平均风速为1.5 m/s。2022年逐日降水量、日最高温度、日最低温度及日平均气温见图1。
![]() 图 1 2022年棉花种植期间降水量和气温Figure 1. Precipitation and air temperature during cotton growth period in 2022
图 1 2022年棉花种植期间降水量和气温Figure 1. Precipitation and air temperature during cotton growth period in 20221.2 试验设计
本试验采用桶栽试验,试验用桶规格为0.55 m×0.50 m×0.55 m(桶顶高×底部半径×顶部半径),桶底已打孔,桶与桶之间并排布置,放置于50 cm深的试验用坑中。试验供试土样分别取自新疆石河子市农二连(土壤质地为砂土)和石河子大学节水灌溉试验站(土壤质地为砂壤土),经过自然晾干、碾碎、过筛、去除碎石块等工序(土壤颗粒组成见表1)。灌水量根据生产实践及前人研究[29],定为全生育期4 500 m3/hm2,灌水矿化度根据本课题组已有研究[30],设置为0.85(当地常用灌溉水矿化度)、2.00、5.00、8.00 g/L,使用医用输液管模拟滴头以精确控制每桶水量,滴头流量1.8 L/h。试验所用肥料分别为尿素、磷酸一铵及硫酸钾。施肥量结合当地农艺措施,磷酸一铵、硫酸钾及尿素施肥量均为300 kg/hm2。全生育期灌水11次,施肥10次,肥随水入,病虫害防治等其他农艺措施与大田一致。
表 1 不同质地土壤试验处理Table 1. Experimental treatments of soils with different textures土壤质地(T)
Soil texture矿化度(S)
Irrigation
water salinity/
(g·L−1)处理
Treatment颗粒组成Particle composition/% 黏粒Clay
(<0.002 mm)粉粒Silt
(0.002~
0.02 mm)砂粒Sand
(>0.02~
2 mm)砂壤土
Sand loam
(T1)2.00(S1) T1S1 11.21 26.32 62.47 5.00(S2) T1S2 8.00(S3) T1S3 0.85(S0) T1S0 砂土
Sandy soil
(T2)2.00(S1) T2S1 3.31 11.57 85.12 5.00(S2) T2S2 8.00(S3) T2S3 0.85(S0) T2S0 本试验以“新陆早42号”为材料,于4月20日播种,采用干播湿出方式,桶内棉花播种按大田一膜三管六行方式为参考,棉株间距11 cm,桶上覆膜,覆膜范围与桶大小一致,塑料地膜采用氧化-生物双降解地膜(山东天状环保有限公司生产),主要为纤维素、淀粉等天然材料,具有氧化降解和生物降解的优点。于9月26日吐絮期收获,全生育期159 d。
1.3 测定项目与方法
1.3.1 光合指标参数测定
在棉花蕾期(6月27日)、花铃期(8月1日)、吐絮期(9月1日)使用LI-6800便携式光合荧光测量仪(Li-COR,USA),选天气晴朗无云且在11:00—13:00的时间段测量棉花净光合速率(Pn,μmol/(m2·s))和蒸腾速率(Tr,mmol/(m2·s)),测定时采用开放气路,CO2气体采自相对稳定的2~3 m的空中,流速设500 μmol/s。每个处理选择生长及受光方向一致的倒三叶(对叶片进行标记),每个处理随机选取3株,取平均值。
1.3.2 荧光指标测定
采用MULTISPEQ型便携式荧光测量系统(Photosynq,USA)分别在棉花蕾期(6月20日)、花铃期(7月29日)、吐絮期(9月4日)测量叶片的叶绿素荧光参数,各处理测量均在凌晨00:00—02:00进行。选取3株长势均匀棉花,挑选1.3.1中已标记的功能叶测量棉花最大荧光(Fm),非光化学淬灭系数(Non-photochemical quenching,NPQt),取3株荧光参数的平均值。
1.3.3 株高茎粗测定
株高(H):每个处理选择3株植株,并做好标记,在棉花苗期(5月27日)、蕾期(6月20日)、花铃期(8月1日)及吐絮期末(9月1日)利用卷尺测定株高。株高为棉株子叶节到主茎顶部的距离。
茎粗(L):每个处理选择3株植株,并做好标记。在棉花苗期(5月27日)、蕾期(6月20日)、花铃期(8月1日)及吐絮期末(9月1日)利用游标卡尺测定茎粗。茎粗为测量棉株子叶节上1 cm处的主茎直径。
1.3.4 棉花产量及纤维品质
2022年9月26日,于各处理测取标记的3株棉花产量构成,记录单株铃数、单铃质量。按固定密度21万株/hm2换算籽棉标准产量。每个处理籽棉产量挑选棉样20 g(脱籽后),委托农业农村部棉花品质监督检测检验中心(安阳)测定棉花纤维马克隆值、纤维长度、整齐度指数、断裂比强度及伸长率,使用HFT9000型棉花纤维检测仪(精度±0.15~1.50)进行检测。
1.3.5 灌溉水分利用效率
灌溉水分利用效率(irrigation water use efficiency,IWUE,kg/m3)为籽棉产量(kg/hm2)与灌溉定额(mm)的比值。
1.4 数据分析
采用Excel 2021进行数据分析,利用OriginPro 2022绘图,用SPSS 26.0等对试验数据进行显著性分析、方差分析、回归分析、相关性分析。
通径分析:通径分析是在相关性分析和回归分析的基础上,把自变量与因变量之间的表面相关性进行分解,研究自变量对因变量的直接影响和间接影响,探究各因素对因变量的影响程度,进而为统计决策提供可靠的依据。本文在不同土壤质地不同灌溉水矿化度处理下,利用通径分析法建立了产量及马克隆值与株高、茎粗、净光合速率、蒸腾速率、最大荧光及非光化学淬灭参数的回归方程,并求得了产量及马克隆值和株高、茎粗、净光合速率、蒸腾速率、最大荧光及非光化学淬灭的通径系数,最终确定了不同土壤质地不同灌溉水矿化度下株高、茎粗、净光合速率、蒸腾速率、最大荧光及非光化学淬灭参数对棉花产量及马克隆值的影响程度。
2. 结果与分析
2.1 不同土壤质地下灌水矿化度对棉花光合的影响
图2为各处理棉花不同生育时期下光合速率和蒸腾速率。由图2a可知,随生育时期推进,棉花叶片净光合速率(Pn)呈现先增大再减小的趋势,在花铃期棉花Pn达到最大,平均值为30.09 µmol/(m2·s);吐絮期最小,平均值为22.12 µmol/(m2·s),吐絮期相比较花铃期减少36.02%。这是因为花铃期处于棉花生长最旺盛的阶段。砂壤土(T1)条件下,S1微咸水对棉花Pn有促进作用,S3咸水对棉花Pn在花铃期及吐絮期 有抑制作用,呈现S1>S0>S2>S3规律,在花铃期T1S1处理相较T1S0处理增加8.40%,T1S3处理相较T1S0处理减少9.48%;砂土条件下,随灌水矿化度增大,对棉花Pn抑制作用越明显,在花铃期T2S3处理相较T2S0处理减小27.13%。矿化度相同水平时,棉花Pn呈现砂壤土优于砂土的规律,在花铃期,T1S1处理相较于T2S1处理增加20.03%,在吐絮期,T1S2处理比T2S2处理增加了11.90%。
![]() 图 2 不同处理各生育时期光合指标注:BS、FBS和BOS分别表示棉花蕾期、花铃期和吐絮期。不同小写字母表示相同生育期内不同处理5%水平差异显著。下同。Figure 2. Photosynthetic indicators at different growth stages under different treatmentsNote: BS, FBS, and BOS represent cotton bud stage, flowering and boll stage, and boll opening stage, respectively. Different lowercase letters indicate significant differences at the 5% level among different treatments during the same reproductive period. The same below.
图 2 不同处理各生育时期光合指标注:BS、FBS和BOS分别表示棉花蕾期、花铃期和吐絮期。不同小写字母表示相同生育期内不同处理5%水平差异显著。下同。Figure 2. Photosynthetic indicators at different growth stages under different treatmentsNote: BS, FBS, and BOS represent cotton bud stage, flowering and boll stage, and boll opening stage, respectively. Different lowercase letters indicate significant differences at the 5% level among different treatments during the same reproductive period. The same below.由图2b可知,棉花叶片蒸腾速率(Tr)随生育时期推进呈现逐渐减小的趋势,在蕾期棉花叶片Tr最高,平均值为8.03 mmol/(m2·s),吐絮期棉花叶片Tr最低,平均值为5.05 mmol/(m2·s),同比减少59.01%。砂壤土条件下,总体呈现S1>S0>S2>S3规律,低灌水矿化度促进Tr,高灌水矿化度抑制Tr,在蕾期,T1S1处理相较于T1S3处理增加7.18%;砂土条件下,总体呈现S0>S1>S2>S3规律,在蕾期T2S1处理相较于T2S0处理减少4.13%,T2S3处理相较于T2S0处理减少10.61%。矿化度相同且≥2.00 g/L时,棉花Tr呈现砂壤土优于砂土的规律。在蕾期,S2灌水矿化度下,T1处理相较于T2处理增加13.48%。
2.2 不同土壤质地下灌水矿化度对棉花荧光的影响
图3为各处理棉花不同生育时期下最大荧光和非光化学淬灭。由图3a可知,Fm蕾期最大,花铃期有所下降,最小值出现在吐絮期。相同土壤质地下,随灌水矿化度增大棉花Fm逐渐下降,T1处理下,S0处理相较S3处理在蕾期、花铃期、吐絮期增加了12.66%、20.24%、24.24%,T2处理下,S0处理比S3处理在蕾期、花铃期、吐絮期增加了18.00%、10.22%、32.75%;相同灌水矿化度下,砂壤土的最大荧光大多高于砂土的最大荧光。S3处理下,T1处理相较T2处理在蕾期、吐絮期增加了17.37%、 14.31%。
![]() 图 3 不同处理各生育时期荧光指标Figure 3. Fluorescence index of different treatments at each growth stage
图 3 不同处理各生育时期荧光指标Figure 3. Fluorescence index of different treatments at each growth stage由图3b可知,滴灌棉花最高NPQt最高值出现在吐絮期,平均值为0.51;花铃期次之,平均值为0.47;最低值出现在蕾期,平均值为0.41。土壤质地相同时,棉花NPQt随灌水矿化度增大而增加,在T1处理下,S1处理比S2处理在蕾期减少3.35%。在灌水矿化度相同时,砂壤土的最大荧光高于砂土的最大荧光,在S3处理下,T1处理比T2处理在花铃期、吐絮期减少6.70%、9.88%。随着灌水矿化度增大,NPQt逐渐增大,砂土NPQt显著大于砂壤土。
2.3 不同土壤质地下灌水矿化度对棉花株高茎粗的影响
不同土壤质地下灌水矿化度灌溉棉花株高见图4a。棉花株高日平均增长量在0.32~0.45 cm/d,增长量最高处理为T1S1,最低处理为T2S3,减少了29.00%。棉花株高在苗期后生育时期,在砂壤土条件各处理呈现S1>S0>S2>S3处理,砂土各处理呈现S0>S1>S2>S3处理。砂壤土条件下蕾期T1S1处理株高相较于T1S0处理增长4.65%;砂土条件下,花铃期T2S0处理株高相较于T2S3处理增长23.81%。当灌水矿化度相同时,棉花株高在蕾期、花铃期、吐絮期日平均增长量呈现砂壤土株高高于砂土的规律,在S1灌水矿化度时,吐絮期棉花株高T1处理生长速率比T2处理增加了15.41%,在S0处理时,T1处理生长速率比T2处理增加5.84%。
![]() 图 4 不同处理各生育时期棉花株高茎粗注:SS表示棉花苗期。Figure 4. Cotton plant height and stem thickness at each growth stage of different treatmentsNote: SS refers to cotton seedling stage.
图 4 不同处理各生育时期棉花株高茎粗注:SS表示棉花苗期。Figure 4. Cotton plant height and stem thickness at each growth stage of different treatmentsNote: SS refers to cotton seedling stage.不同土壤质地灌水矿化度下棉花茎粗见图4b。棉花茎粗在苗期后生育时期,砂壤土条件下呈现S1大于S2和S3的规律。在花铃期,T1S1处理茎粗相较于T1S3处理增加11.32%,T2S0处理茎粗相较于T2S3增长8.77%,T1S3处理茎粗相较于T1S0处理减少8.49%。在灌水矿化度相同时,不同土壤质地下棉花茎粗有明显差异,大体表现为砂土棉花茎粗长势差于砂壤土棉花茎粗长势,在花铃期,T1S2处理茎粗相较于T2S2处理增加了6.98%。
2.4 不同土壤质地下灌水矿化度对棉花产量的影响
由表2可知,灌水矿化度对各指标的影响达到显著或极显著水平(P<0.05或P <0.01);土壤质地仅仅极显著影响产量和灌溉水利用效率( P <0.05),且土壤质地与灌水矿化度对棉花产量及灌溉水利用效率有极显著交互作用( P <0.01)。T1S1处理棉花产量相较于T2S1处理增加13.23%。在T1处理下,S0处理产量相较S2增加9.04%;在T2处理下,S0处理灌溉水利用效率相较于S3处理增加32.58%。在S0和S3时T1和T2处理产量无显著差异,但在S2时,T1处理棉花籽棉产量相较于T2增加了9.86%。
表 2 不同处理棉花产量和产量构成及灌溉水利用效率Table 2. Yield and yield components and irrigation water use efficiency of cotton in different treatments处理
Treatments单株铃数
Bolls number
of per plant单铃质量
Single boll weight/g籽棉产量
Seed cotton yield/(kg·hm−2)灌溉水利用效率
Irrigation water
use rate/(kg·m−3)T1S0 6.43±0.09 ab 6.16±0.22 a 5 426.21±408.93 ab 1.21±0.04 ab T1S1 6.67±0.16 a 6.19±0.35 a 5 773.13±227.22 a 1.28±0.08 a T1S2 6.03±0.11 ab 5.95±0.27 b 4 976.52±119.75 cd 1.11±0.05 cd T1S3 5.72±0.11 b 5.39±0.21 a 4 372.39±123.13 e 0.97±0.03 e T2S0 6.39±0.13 ab 6.13±0.17 a 5 096.78±187.13 bc 1.18±0.04 bc T2S1 6.16±0.14 ab 6.02±0.28 a 4 893.56±232.18 cd 1.09±0.04 cd T2S2 5.91±0.05 ab 5.48±0.23 b 4 605.76±331.94 e 0.95±0.03 e T2S3 5.52±0.22 b 5.32±0.30 b 4 293.47±122.96 de 0.89±0.03 d e ANOVA分析F值 F value of ANOVA analysis T 2.10ns 3.07ns 20.21** 20.21** S 3.92* 11.04** 21.52** 21.52** T×S 0.58ns 2.23ns 6.94** 6.94** 注(Note):*,P<0.05;**,P<0.01。 2.5 不同土壤质地下灌水矿化度对棉纤维品质的影响
不同土壤质地灌水矿化度对棉花品质的影响如表3所示。棉花上半部平均长度受灌水矿化度,灌水矿化度及土壤质地交互影响均显著(P<0.05);T1S0处理上半部平均长度为27.10 mm,T1S2处理为27.70 mm;T2S0处理棉花上半部平均长度为27.30 mm,T2S1处理为27.70 mm。灌水矿化度、土壤质地及两者交互作用对棉花断裂比强度影响极显著(P<0.01);砂壤土处理断裂比强度优于砂土处理,T1S2处理为27.80 cN/tex,较T2S2(26.80 cN/tex)提高3.73%;砂壤土平均棉花断裂比强度为28.43 cN/tex,砂土平均棉花断裂比强度为26.65 cN/tex。灌水矿化度对棉花马克隆值影响显著(P<0.05);马克隆值随灌水矿化度的升高呈现增长的趋势,T1S0处理马克隆值为4.50,T1S3处理马克隆值为5.40,相比较增长20%;T2S0处理马克隆值为4.60,T2S3处理马克隆值为5.50,相比较增长20%。灌水矿化度及土壤质地互作对棉花断裂伸长率影响显著(P<0.05);T2S3处理断裂伸长率为4.70%,T1S1处理断裂伸长率为5.30%,增长约13%。
表 3 不同处理下棉花品质指标Table 3. Cotton quality indicators under different treatments处理
Treatments上半部
平均长度
Mean length of upper part/mm整齐度Uniformity/% 断裂比强度Breakings strength/
(cN·tex−1)马克隆值Micronaire 断裂伸长率Breaking elongation/% T1S0 27.10±0.87 a 82.50±5.22 a 28.60±1.06 a 4.50±0.09 c 5.50±0.15a b T1S1 27.50±1.20 a 82.70±5.66 a 28.80±0.92 a 4.70±0.17 c 5.30±0.03 a T1S2 27.70±0.43 a 82.00±1.60 a 27.80±0.89 ab 5.10±0.26 b 5.20±0.25 a T1S3 27.20±0.83 a 79.90±2.57 a 28.50±1.00 a 5.40±0.18 ab 5.40±0.24 a T2S0 27.30±0.92 a 82.00±3.31 a 28.50±0.54 a 4.60±0.21 c 5.20±0.21 a T2S1 27.70±0.56 a 81.50±3.60 a 28.40±0.57 a 4.60±0.15 c 5.10±0.26 ab T2S2 27.20±0.90 a 83.00±3.07 a 26.80±0.99 b 5.30±0.11 ab 5.30±0.34 a T2S3 24.70±0.86 b 80.60±1.67 a 22.90±0.20 c 5.50±0.31 a 4.70±0.16 b ANOVA分析F值 F value of ANOVA analysis T 3.51ns <0.01 ns 27.95** 0.86 ns 2.73ns S 4.69* 0.49ns 16.52** 28.46** 1.01ns T×S 3.39* 0.12ns 14.73** 0.60ns 4.96* 通过回归分析得出灌水矿化度(x1,g/L)与棉花产量(y,kg/hm2)间关系式:
{y=4.35×103+(6.68×1033.69√π2)×e(x1−2.617.38)2(砂壤土,R2=0.93)y=5.83×103−174.76x1(砂土,R2=0.72) (1) 灌水矿化度与马克隆值(x2,cN/tex)的关系如下:
y=4.43+0.12x2(砂壤土,R2=0.82)y=4.44+0.14x2(砂土,R2=0.77) (2) 通过式(1)可知砂壤土条件下在灌水矿化度0.85~8.00 g/L内, 当灌水矿化度为2.61 g/L时,理论上棉花产量可以到5797.36 kg/hm2,当灌水矿化度为3.69 g/L时棉花产量显著降低;砂土条件下棉花产量呈现线性减小的趋势,当灌水矿化度为0.85 g/L,棉花产量为5096.78 kg/hm2。砂土及砂壤土条件下棉花马克隆值呈现增长的趋势。
2.6 生理生长指标与棉花产量、马克隆值的关系
对棉花生理生长指标与产量及品质进行通径分析结果如表4所示。
表 4 生理生长指标与产量及品质间通径分析Table 4. Pathway analysis between physiological growth index and yield and quality土壤质地
Soil texture指标
Indexes自变量
Independent variable简单相关系数
Single correlation coefficient直接通径系数
Direct path coefficient间接通径系数Indirect path coefficient H L Fm NPQt Pn Tr 合计Total 砂壤土
Sandy loam产量
Yield株高(H) 0.92 0.22 0.75 −0.09 0.16 −0.02 −0.10 0.71 茎粗(L) 0.95 0.86 0.19 −0.06 0.06 −0.02 −0.09 0.09 最大荧光(Fm) 0.60 −0.12 0.16 0.41 0.21 −0.01 −0.05 0.72 光化学淬灭系数(NPQt) −0.46 −0.29 −0.12 −0.18 0.09 0.01 0.04 −0.17 净光合速率(Pn) 0.74 −0.02 0.17 0.66 −0.04 0.06 −0.08 0.76 蒸腾速率(Tr) 0.81 −0.11 0.19 0.69 −0.06 0.10 −0.01 0.92 马克隆值
Micronaire株高(H) −0.80 0.78 −0.59 −0.20 −0.41 −0.13 −0.26 −1.58 茎粗(L) −0.65 −0.68 0.68 −0.13 −0.16 −0.13 −0.23 0.03 最大荧光(Fm) −0.79 −0.27 0.56 −0.33 −0.55 −0.06 −0.14 −0.51 光化学淬灭系数(NPQt) 0.80 0.75 −0.43 0.14 0.20 0.04 0.10 0.06 净光合速率(Pn) −0.55 −0.17 0.61 −0.52 −0.09 −0.15 −0.22 −0.37 蒸腾速率(Tr) −0.67 −0.29 0.69 −0.55 −0.13 −0.27 −0.13 −0.38 砂土
Sandy产量
Yield株高(H) 0.92 0.33 −0.46 0.50 0.78 0.21 −0.44 0.60 茎粗(L) 0.81 −0.56 0.27 0.40 0.89 0.19 −0.38 1.36 最大荧光(Fm) 0.85 0.64 0.26 −0.35 0.63 0.20 −0.53 0.21 光化学淬灭系数(NPQt) −0.89 −0.95 −0.27 0.52 −0.43 −0.18 0.41 0.05 净光合速率(Pn) 0.82 0.26 0.26 −0.40 0.49 0.65 −0.44 0.57 蒸腾速率(Tr) 0.86 −0.55 0.26 −0.39 0.62 0.71 0.21 1.40 马克隆值
Micronaire株高(H) −0.91 −0.80 0.02 −0.38 −0.01 0.08 0.19 −0.11 茎粗(L) −0.72 0.02 −0.66 −0.31 −0.02 0.07 0.16 −0.74 最大荧光(Fm) −0.81 −0.49 −0.63 0.01 −0.01 0.08 0.23 −0.32 光化学淬灭系数(NPQt) 0.74 0.02 0.66 −0.02 0.33 −0.07 −0.18 0.73 净光合速率(Pn) −0.72 0.10 −0.64 0.01 −0.37 −0.01 0.19 −0.82 蒸腾速率(Tr) −0.79 0.23 −0.64 0.01 −0.47 −0.01 0.08 −1.03 由表4可知,在砂壤土条件下,茎粗对产量的直接影响最大,为 0.86,蒸腾速率对产量的间接影响最大,为 0.92;在砂土条件下,非光化学淬灭系数对产量的直接影响最大,为−0.95,蒸腾速率对产量的间接影响最大,为 1.40;在砂壤土条件下,株高对马克隆值的直接影响最大,为 0.78,株高对马克隆值的间接影响最大,为−1.58;在砂土条件下,株高对马克隆值的直接影响最大,为−0.80,蒸腾速率对马克隆值的间接影响最大,为−1.03。
3. 讨 论
微咸水、咸水在一定程度上可以缓解淡水资源供需矛盾,但不可避免地将盐分带入棉田中,不同土壤质地由于其特性差异造成对植株盐害程度不一,进而影响棉花光合[31]。例如,刘芳婷等[25]得出不同土壤质地棉花叶片净光合速率、蒸腾速率均表现为壤土大于砂土。本试验棉花光合特性(Pn、Tr)也呈现出砂壤土(T1)优于砂土(T2)的规律。这可能是由于砂土中砂粒含量较高,颗粒间孔隙较大,导水能力强,持水能力差,而砂壤土黏粒比例较高,导水能力差,持水能力强[32],砂土供应水分不足,引起植株干旱缺水进而影响棉花叶片酶总量和酶活性显著降低,叶绿体活力降低,最终影响棉花叶片光合速率、蒸腾速率[33-35]。微咸水、咸水灌溉在一定程度上节约淡水资源,另一方面会给土壤环境带来盐分,改变土壤中盐分分布,进而影响植株生理状态,合理范围内盐分可以促进植株生理状态。例如,REN等[34]研究表明,随灌水矿化度增大,棉花净光合速率呈现先增大再减小趋势,蒸腾速率呈现下降趋势。本试验也表明,在砂壤土条件下,随灌水矿化度增大,棉花净光合速率(Pn),蒸腾速率(Tr)呈现先增大后减小的趋势,在砂土条件下,随灌水矿化度增大,棉花净光合速率(Pn),蒸腾速率(Tr)呈现减小的趋势。适宜的盐分可以促进光合,这是因为低盐环境给光合作用中的化学反应提供有利条件;当盐分超过一定浓度时则产生负效应,盐分胁迫造成叶绿素生物合成及光合色素降解及相关酶活性下降,进而造成光合作用的紊乱[36-37]。因砂土保水性差,当灌溉后,带入土壤的盐分进一步加深植株干旱程度。
不同土壤质地下微咸水灌溉会对棉花造成胁迫,而叶绿素荧光反应可以快速、灵敏和非破坏性地分析逆境胁迫对植株的影响,因此常用荧光指标的变化表征受胁迫的程度。例如,刘瑞显等[38]发现水分亏缺使植物潜在最大光合能力降低,NPQt增大,丁怡人等[39]发现最大荧光(Fm)随生育时期推进减小。本试验研究发现随灌水矿化度增大和生育时期推进Fm减小,NPQt增大;砂土Fm下降程度大于砂壤土,砂土NPQt较砂壤土显著提升。这是由于植物通过PSⅡ吸收光能,盐分抑制植物叶片PSⅡ吸收光能的效率,使植株光能利用效率降低,植株为了保护光合器官不受到伤害,进而通过提高NPQt让多余的光能以热耗散的形式消弭,胁迫越大则以热耗散消失的能量越多。Fm表征作物受胁迫情况,受盐分胁迫程度越大,下降幅度也越大[40]。本研究中,随生育时期推进,灌水次数增加使进入棉田的盐分变多,盐分胁迫效应逐渐变强,Fm呈现随生育时期推进逐渐减小,NPQt随生育时期推进逐渐升高的趋势。刘晓龙等[41]研究发现盐分胁迫造成水稻Fm下降,与本文研究一致。而孙文君等[42]研究发现Fm随着盐分浓度增加呈现先增后减的趋势,NPQt逐渐增大,与本研究发现略有差异,这主要是因为此试验在人工气候箱内且只关注苗期荧光的变化。
不同土壤质地条件下,棉花生理生长及产量品质等在一定程度上会受到影响。例如,马君等[43]研究表明,较低盐分胁迫能够在一定程度上激发作物生长,这与本试验结论一致,在砂壤土条件下粗在蕾期、花铃期及吐絮期棉花株高在2 g/L大于0.85、5及8 g/L的规律。棉花是耐盐作物,土壤盐分适当促进营养物质从营养器官向生殖器官的转移。在砂土条件下高灌水盐度灌溉对棉花株高、茎粗在蕾期、花铃期及吐絮期影响显著高于低灌水盐度的规律。不同土质株高、茎粗在蕾期、花铃期及吐絮期呈现砂土小于砂壤土的规律。这可能是由于砂土通透性好,在生长前期由于植株需水量较少,因此利于前期生长,但在生长中后期由于作物需水能力增强,但由于其保水保肥性能差,不能及时提供植株所需的水分及营养,因此生长速率较砂壤土差。株高、茎粗同单铃成铃密切相关。棉花株高茎粗直接反映棉花光能利用率,进而影响棉花结铃和产量。宋继辉等[44]在新疆南疆生态条件下采用膜下滴灌,在同一地块开展不同土质研究,结果表明,棉花单株成铃数和籽棉产量均表现为壤土大于砂土。李万精等[35]研究发现,4 g/L的微咸水灌溉不会造成棉花减产。本试验砂壤土棉花产量大于砂土产量,砂壤土呈现低灌水矿化度促进单株铃数及产量,高矿化度抑制单株铃数及产量;砂土条件下呈现随矿化度升高单铃质量及产量呈现下降的趋势。此外,本试验研究发现,灌水矿化度在2.00~8.00 g/L内,随灌水矿化度升高棉花马克隆值呈现增长的趋势。冯泉清等[45]研究发现盐分胁迫会导致棉花马克隆值升高,品质下降,与本试验研究一致。这是由于在高盐分条件下,盐分抑制棉花细胞的分裂和内部结构来影响棉花的生长发育,从而降低棉花纤维的质量[46-47]。
不同土壤质地由于其保水性能的差异,影响棉株的生理生长,而微咸水尽管可以缓解水资源的供需矛盾,但不可避免对棉株生长发育造成盐分胁迫,进而造成棉株生理缺水,影响其生长。本试验研究发现砂土条件下使用非淡水对棉花生理、生长均产生抑制作用,随着灌水矿化度的增大抑制作用越增强。然而合理使用尿素可以有效减缓盐分对棉株造成的胁迫,有关不同土壤质地灌水矿化度下不同施肥水平对棉花生理生长的影响有待进一步研究。本文结论是基于桶栽试验,与当地大田试验仍存在差异,但是可以为今后大田试验提供参考。
4. 结 论
本文基于桶栽试验,研究了不同土壤质地下微咸水灌溉对棉花生理、生长特性及产量品质的影响。结论如下:
1)在砂土条件下,随灌水矿化度增大,苗期后株高、茎粗、净光合速率及蒸腾速率呈现减小的趋势;在砂壤土条件下,随灌水矿化度增大,苗期后株高、茎粗、净光合速率及蒸腾速率呈现先增后减的趋势。随灌水矿化度升高最大荧光呈现减小的趋势,非光化学淬灭呈现增加的趋势。随生育时期推进,棉花叶片净光合速率呈现先增后减的趋势,花铃期为30.09 µmol/(m2·s);吐絮期为22.12 µmol/(m2·s),相比较减少36.02%。棉花叶片蒸腾速率及最大荧光呈现减小的趋势,棉花叶片非光化学淬灭呈现增大的趋势,滴灌棉花最高非光化学淬灭最高值出现在吐絮期,平均值为0.51;花铃期次之,平均值为0.47;最低值出现在蕾期,平均值为0.41。
2)在灌水矿化度0.85~8.00 g/L内,在砂壤土条件下,棉花产量与灌水矿化度呈现先增后减的趋势,用小于3.69 g/L的微咸水灌溉不会对棉花产生显著减产效应;砂土条件下,棉花产量与灌水矿化度呈现线性减少的趋势;2种土质条件下,棉花马克隆值与灌水矿化度呈现正相关的趋势。
3)在砂壤土条件下,棉花茎粗、蒸腾速率是影响产量的主要因素。株高是影响马克隆值的主要因素。在砂土条件下,非光化学淬灭系数、蒸腾速率是影响产量的 主要因素,株高、蒸腾速率是影响马克隆值的主要因素。
-
![]()
图 1 终点基准转角示意图
注:ω为拓展方向与终点基准方向的夹角(°)。
Figure 1. Schematic diagram of terminal datum corner
Note: ω is the angle between the expansion direction and the end point reference direction (°).
![]()
图 2 冗余指令节点删除过程示意图
注:P0−P10为路径节点;ds为安全距离阈值;dmax为各节点到P0与P10虚连线段的最大距离;dmax1 为P0到P4段各节点到 P0与 P4虚连线段的最大距离。
Figure 2. Schematic diagram of the redundant instruction node removal process
Note: P0−P10 are path nodes; ds is the safe distance threshold; dmax is the maximum distance from each node to the P0 and P10 dashed line segments; dmax1is the maximum distance from each node of the P0 to P4 segment to the dashed line segment between P0 and P4.
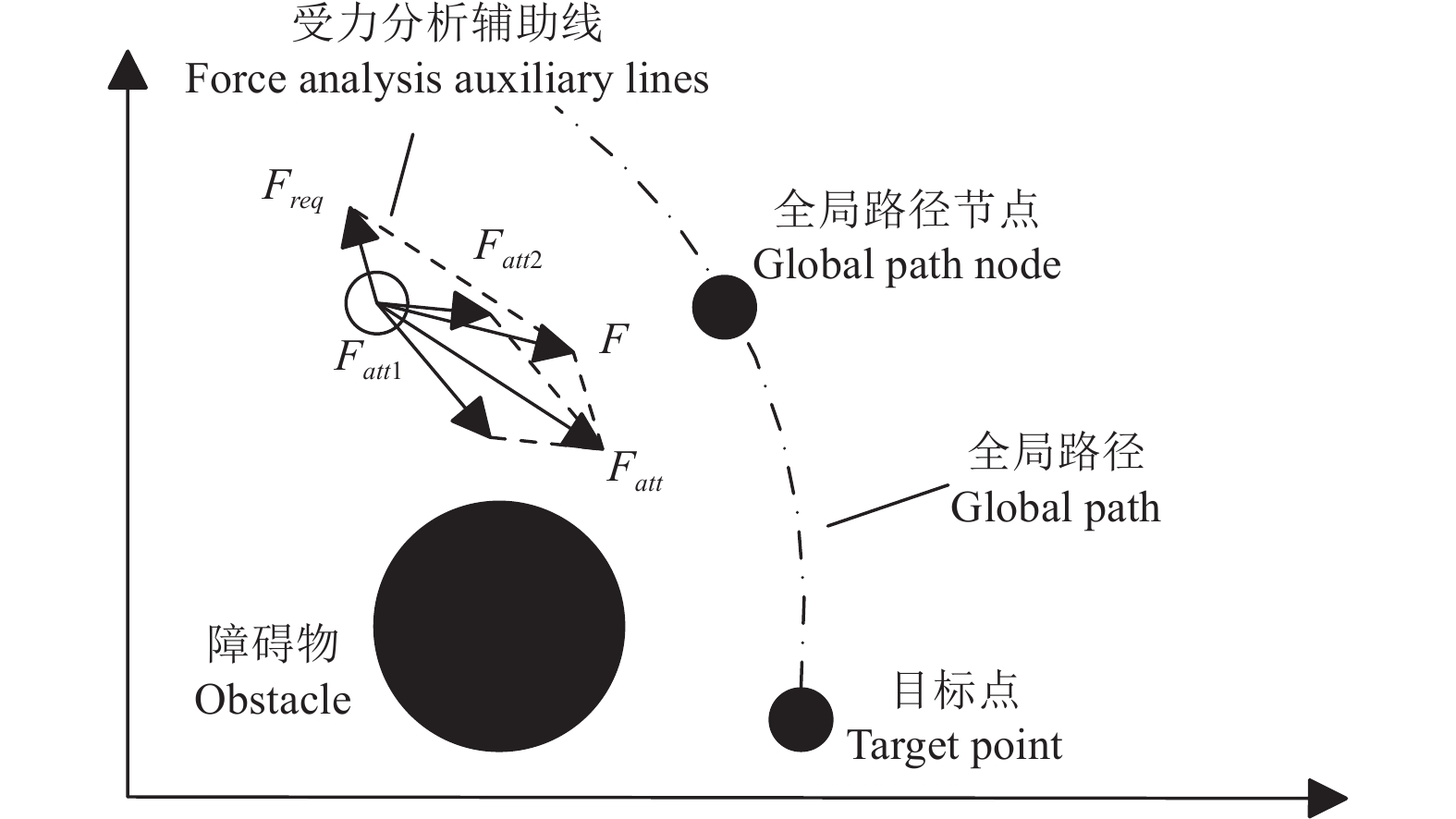
![]()
图 3 改进人工势场函数受力分析示意图
注:Fatt1为终点引力;Fatt2为全局路径引力;Fatt为Fatt1和Fatt2的合力;Freq为增强斥力;F为投饵船所受合力。
Figure 3. Schematic force analysis of the improved artificial potential field function
Note: Fatt1 is the terminal gravitational force; Fatt2 is the global path gravitational force; Fatt is the resultant force of Fatt1 and Fatt2; Freq is the enhanced repulsive force; F is the resultant force on the feeding boat.
![]()
图 4 FIA*-APF算法流程图
注:F(n)是改进A*算法的评价函数;G(n)是改进A*算法的实际代价函数;H(n)是改进A*算法的预估代价函数。
Figure 4. Flowchart of the FIA*-APF (Fusion of improved A* and artificial potential field) algorithm
Note: F(n) is the evaluation function of the improved A* algorithm; G(n) is the actual cost function of the improved A* algorithm; H(n) is the predicted cost function of the improved A* algorithm.
![]()
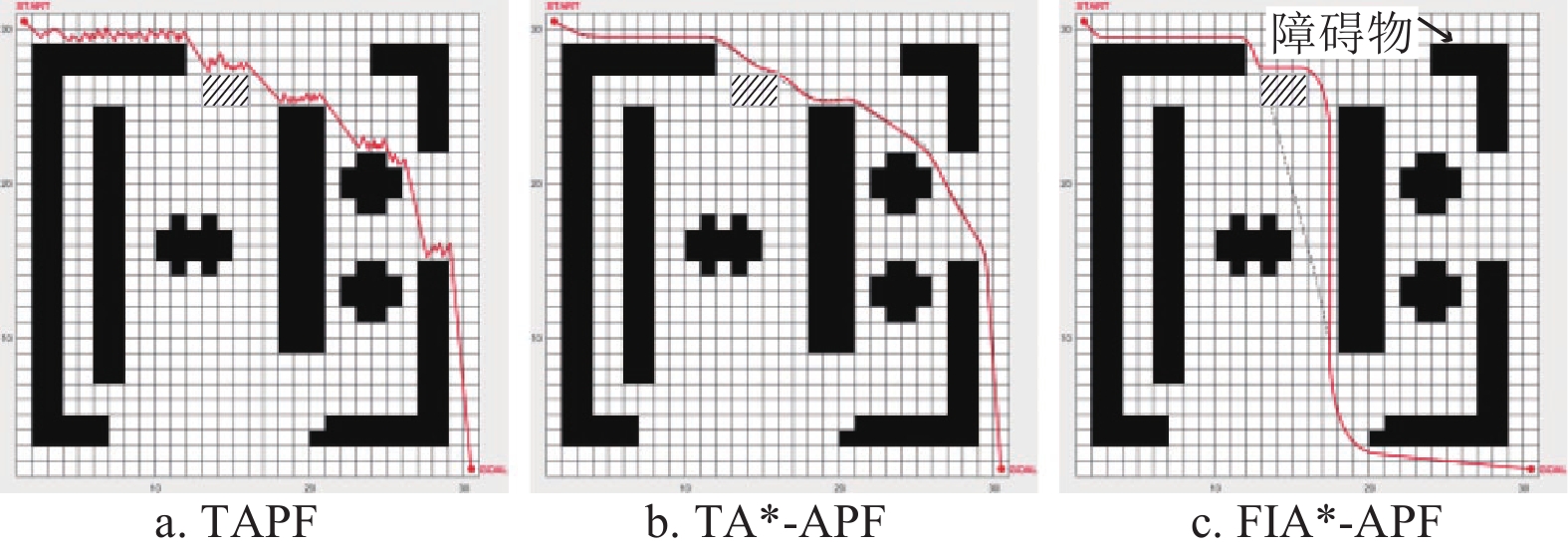
图 5 静态已知障碍物环境不同算法规划的路径
注:黑色物块为障碍物;虚线是平滑处理前的路径;实线是平滑处理后的路径。下同。
Figure 5. Paths planned by different algorithms in environments with static known obstacles
Note: Black blocks are obstacles; The dashed line is the path before smoothing; The solid line is the path after smoothing. Same as below.
![]()
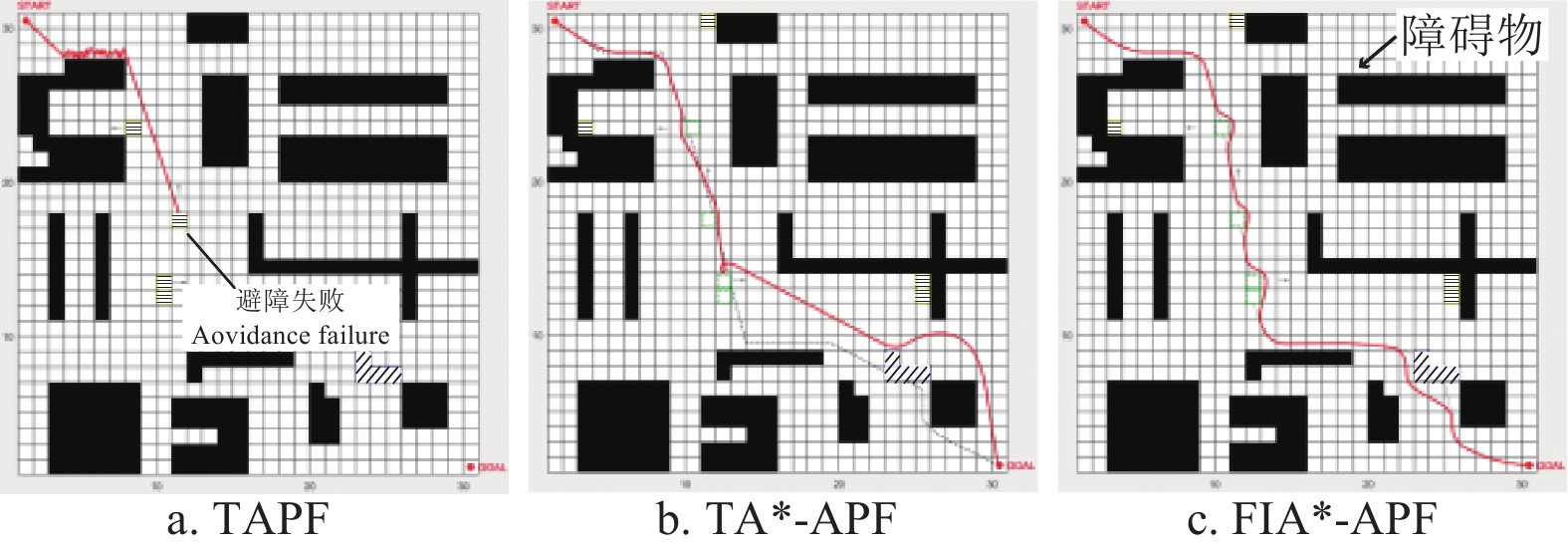
图 6 含静态未知障碍物环境不同算法规划的路径
注:TAPF是传统人工势场法;TA*-APF是A*与人工势场融合算法;FIA*-APF为本文提出的改进A*算法与人工势场法的融合算法;斜线填充部分是静态未知障碍物;虚线是仅A*算法规划出的路径;实线是各算法规划出的最终路径。
Figure 6. Paths planned by different algorithms in environments with static unknown obstacles
Note: TAPF is the traditional artificial potential field method; TA*-APF is the A* and artificial potential field fusion algorithm; FIA*-APF is the fusion algorithm of the improved A * algorithm and artificial potential field method proposed in this paper; The diagonal filling part is the static unknown obstacle; The dashed line is the static path planned by the A* algorithm; the solid shows the final path planned by the algorithm.
![]()
图 7 含动态未知障碍物环境不同算法规划的路径
注:斜线填充部分是静态未知障碍物;横线填充部分是动态障碍物;箭头是动态障碍物运动方向;虚线是仅A*算法规划出的静态路径;实线是各算法规划出的最终路径。
Figure 7. Paths planned by different algorithms in environments with dynamic unknown obstacles
Note: The diagonal filling part is the static unknown obstacle; the horizontal filling part is the dynamic obstacle; the arrow is the dynamic obstacle movement direction; the dotted line is the static path planned by the A* algorithm; the solid shows the final path planned by algorithms.
![]()
图 9 实际蟹塘环境投饵船路径规划试验结果
注:黑色部分为池塘障碍物,曲线为投饵船规划行驶路径。
Figure 9. Experimental results of feeding boat path planning in actual crab pond environments
Note: The black parts are the obstacles in the pond, the curve shows the planned travel path of the feeding boat.
表 1 静态已知障碍物环境不同算法仿真试验结果
Table 1 Simulation test results of different algorithms in static known obstacle environments
算法
Algorithm路径长度
Path length/m指令节点数量
Number of instruction nodes转折角度
Turning angle/(°)规划时间
Planning time/ms未平滑路径
Unsmoothed path平滑后路径
Smoothed path平滑前
Pre-smoothing平滑后
SmoothedTASA 54.55 54.55 295.60 450.0 450.0 7.51 IASA 50.91 49.06 136.30 630.0 343.7 2.33 本文改进A*算法
The improved A* algorithm(OASA)47.62 47.19 72.45 240.0 227.6 1.69 注:TASA是传统A*算法;IASA是改进A*算法;表中数据是20次仿真试验结果的平均值。下同。
Note: TASA is the traditional A* algorithm; IASA is the improved A* algorithm; the data in the table are the average of 20 simulation test results. the same below. 下载: 导出CSV
下载: 导出CSV
表 2 含静态未知障碍物环境不同算法仿真试验结果
Table 2 Simulation test results of different algorithms in static unknown obstacle environments
算法
Algorithm规划成功次数
Number of
successful planning规划时间
Planning time/s指令节点数量
Number of
instruction nodes路径长度
Path length/mTAPF 6 5.19 463.20 50.39 TA*-APF 20 1.51 355.90 46.06 FIA*-APF 20 0.85 131.75 45.56
下载: 导出CSV
表 3 含动态未知障碍物环境不同算法仿真试验结果
Table 3 Simulation test results of different algorithms in dynamic unknown obstacle environments
算法
Algorithm规划成功次数
Number of
successful planning规划时间
Planning time/s指令节点
数量
Number of
instruction nodes路径长度
Path length/mTAPF 0 8.90 236.15 − TA*-APF 20 3.38 504.10 47.38 FIA*-APF 20 1.61 165.95 45.22
下载: 导出CSV
表 4 实际蟹塘环境不同算法路径规划试验结果
Table 4 Experimental results of path planning using different algorithms in actual crab pond environments
算法
Algorithm规划时间
Planning time/s>60°转角数量
Number of
rotation angle >60°>100°转角数量
Number of
rotation angle >100°路径长度
Path length/mTAPF 71.52 9.5 5.6 80.41 TA*-APF 43.72 7.6 2.5 63.43 FIA*-APF 27.29 2.9 1.5 56.99
下载: 导出CSV
-
[1] 孙中勇,宋迁红,赵永锋,等. 河蟹、小龙虾养殖发展现状分析[J]. 科学养鱼,2023(6):7-10. [2] 王小雨. 河蟹养殖自动投饵船作业轨迹规划研究[D]. 镇江:江苏大学,2022. WANG Xiaoyu. Research on Trajectory Planning of Automatic Feeding Boat for Crab Culture[D]. Zhenjiang: Jiangsu University, 2022. (in Chinese with English abstract)
[3] 洪剑青,赵德安,孙月平,等. 水产养殖无人导航明轮船运动仿真与试验[J]. 农业机械学报,2016,47(3):124-130. HONG Jianqing, ZHAO De'an, SUN Yueping, et al. Motion simulation and test of aquaculture unmanned navigation paddlewheel vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 124-130. (in Chinese with English abstract)
[4] 赵德安,罗吉,孙月平,等. 河蟹养殖自动作业船导航控制系统设计与测试[J]. 农业工程学报,2016,32(11):181-188. ZHAO De'an, LUO Ji, SUN Yueping, et al. Design and experiment of navigation control system of automatic operation boat in river crab culture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 181-188. (in Chinese with English abstract)
[5] 孙月平,赵德安,洪剑青,等. 河蟹养殖船载自动均匀投饵系统设计及效果试验[J]. 农业工程学报,2015,31(11):31-39. SUN Yueping, ZHAO De'an, HONG Jianqing, et al. Design of automatic and uniform feeding system carried by workboat and effect test for raising river crab[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(11): 31-39. (in Chinese with English abstract)
[6] PATLE B K, PARHI D R K, JAGADEESH A, et al. Matrix-binary codes based genetic algorithm for path planning of mobile robot[J]. Computers and Electrical Engineering, 2018, 67(1): 708-728.
[7] 宫金良,王伟,张彦斐,等. 基于农田环境的农业机器人群协同作业策略[J]. 农业工程学报,2021,37(2):11-19. GONG Jinliang, WANG Wei, ZHANG Yanfei, et al. Cooperative working strategy for agricultural robot groups based on farmland environment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(2): 11-19. (in Chinese with English abstract)
[8] FU B, CHEN L, ZHOU Y T, et al. An improved A* algorithm for the industrial robot path planning with high success rate and short length[J]. Robotics and Autonomous Systems, 2018, 106(7): 26-37.
[9] 段书用,王启帆,韩旭,等. 具有确保安全距离的A*路径优化方法[J]. 机械工程学报,2020,56(18):205-215. doi: 10.3901/JME.2020.18.205 DUAN Shuyong, WANG Qifan, HAN Xu, et al. Improved A-star algorithm for safety insured optimal path with smoothed corner turns[J]. Journal of Mechanical Engineering, 2020, 56(18): 205-215. (in Chinese with English abstract) doi: 10.3901/JME.2020.18.205
[10] 赵春宇,姜皓,徐茂竹,等. 改进A*算法在无人船路径规划中的应用[J]. 浙江工业大学学报,2022,50(6):615-620. ZHAO Chunyu, JIANG Hao, XU Maozhu, et al. Application of improved A* algorithm in unmanned ship path planning[J]. Journal of Zhejiang University of Technology, 2022, 50(6): 615-620. (in Chinese with English abstract)
[11] XIONG X Y, MIN H T, YU Y B, et al. Application improvement of A* algorithm in intelligent vehicle trajectory planning[J]. Mathematical Biosciences and Engineering, 2021, 18(1): 1-21. doi: 10.3934/mbe.2021001
[12] PRIYANKA S, VELAPPA G. Trajectory planning of a mobile robot using enhanced A-star algorithm[J]. Indian Journal of Science and Technology, 2016, 9(41): 1-10.
[13] 孙功武,苏义鑫,顾轶超,等. 基于改进蚁群算法的水面无人艇路径规划[J]. 控制与决策,2021,36(4):847-856. SUN Gongwu, SU Yixin, GU Yichao, et al. Path planning for unmanned surface vehicle based on improved ant colony algorithm[J]. Control and Decision, 2021, 36(4): 847-856. (in Chinese with English abstract)
[14] 张瑜,宋荆洲,张琪祁,等. 基于改进动态窗口法的户外清扫机器人局部路径规划[J]. 机器人,2020,42(5):617-625. ZHANG Yu, SONG Jingzhou, ZHANG Qiqi, et al. Local path planning of outdoor cleaning robot based on an improved DWA[J]. Robot, 2020, 42(5): 617-625. (in Chinese with English abstract)
[15] 王兵,吴洪亮,牛新征,等. 基于改进势场法的机器人路径规划[J]. 计算机科学,2022,49(7):196-203. WANG Bing, WU Hongliang, NIU Xinzheng, et al. Robot path planning based on improved potential field method[J]. Computer Science, 2022, 49(7): 196-203. (in Chinese with English abstract)
[16] 罗强,王海宝,崔小劲,等. 改进人工势场法自主移动机器人路径规划[J]. 控制工程,2019,26(6):1091-1098. LUO Qiang, WANG Haibao, CUI Xiaojin, et al. Autonomous mobile robot path planning based on improved artificial potential method[J]. Control Engineering of China, 2019, 26(6): 1091-1098. (in Chinese with English abstract)
[17] MONTIEL O, SEPULVEDA R, OROZCO-RSOAS U, et al. Optimal path planning generation for mobile robots using parallel evolutionary artificial potential field[J]. Journal of Intelligent & Robotic Systems, 2015, 79(2): 237-257.
[18] 劳彩莲,李鹏,冯宇. 基于改进A*与DWA算法融合的温室机器人路径规划[J]. 农业机械学报,2021,52(1):14-22. LAO Cailian, LI Peng, FENG Yu. Path planning of greenhouse robot based on fusion of improved A* algorithm and dynamic window approach[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 14-22. (in Chinese with English abstract)
[19] ERKE S, BIN D, YIMING N, et al. An improved A-star based path planning algorithm for autonomous land vehicles[J]. International Journal of Advanced Robotic Systems, 2020, 17(5): 1-13.
[20] LIN M X, YUAN K, SHI C Z, et al. Path planning of mobile robot based on improved A* algorithm[C]//Proceedings of the 2017 29th Chinese Control and Decision Conference, Chongqing, China: Institute of Electrical and Electronics Engineers Inc, 2017: 3570-3576.
[21] 余翔,姜陈,段思睿,等. 改进A*算法和人工势场法的路径规划[J]. 系统仿真学报,2024,36(3):782-794. YU Xiang, JIANG Chen, DUAN Sirui, et al. Path planning for improvement of A* algorithm and artificial potential field method[J]. Journal of System Simulation, 2024, 36(3): 782-794. (in Chinese with English abstract)
[22] 任彦,赵海波. 改进人工势场法的机器人避障及路径规划[J]. 计算机仿真,2020,37(2):360-364. REN Yan, ZHAO Haibo. Robot obstacle avoidance and path planning with improved artificial potential field method[J]. Computer Simulation, 2019, 37(2): 360-364. (in Chinese with English abstract)
[23] TANG B, HIROTA K, WU X, et al. Path planning based on improved Hybrid A * algorithm[J]. Journal of Advanced Computational Intelligence and Intelligent Informatics, 2021, 25(1): 64-72. doi: 10.20965/jaciii.2021.p0064
[24] ABDALLA T Y, ABED A, AHMED A A, et al. Mobile robot navigation using PSO optimized fuzzy artificial potential field with fuzzy control[J]. Journal of Intelligent & Fuzzy Systems, 2017, 32(6): 3893-3908.
[25] CHEN J Q, TAN C Z, MO R X, et al. Research on path planning of three-neighbor search A* algorithm combined with artificial potential field[J]. International Journal of Advanced Robotic Systems, 2021, 18(3): 1-13.
[26] 欧昌奎,谢磊,查天奇,等. 基于深度强化学习和历史轨迹的船舶路径规划[J]. 中国航海,2024,47(1):36-44,51. OU Changkui, XIE Lei, ZHA Tianqi , et al. Ship path planning based on deep reinforcement learning and historical trajectories[J]. Navigation of China, 2024, 47(1): 36-44, 51. (in Chinese with English abstract)
[27] 周彬,郭艳,李宁,等. 基于导向强化Q学习的无人机路径规划[J]. 航空学报,2021,42(9):498-505. ZHOU Bin, GUO Yan, LI Ning, et al. Path planning of UAV using guided enhancement Q-Learning algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(9): 498-505. (in Chinese with English abstract)
[28] GONG M F, XU H X, FENG H, et al. Ship local path planning based on improved Q-Learning[J]. Journal of Ship Mechanics, 2019, 37(2): 360-364.
[29] MANEV N, TEMELKOCSKI B, SERAFIMOVA N, et al. Novel approach for finding shortest route using Dijkstra’s algorithm and fuzzy logic in a wireless sensor network integrated in a forest fire detection system[J]. Environmental Engineering and Management Journal, 2020, 19(6): 1007-1016. doi: 10.30638/eemj.2020.095
[30] 魏立新,高嘉良,蒋容,等. 基于BFS算法的油田污水系统参数计算方法研究[J]. 当代化工,2021,50(1):117-122. doi: 10.3969/j.issn.1671-0460.2021.01.028 WEI Lixin, GAO Jialiang, JIANG Rong, et al. Study on parameter calculation method of oilfield sewage system based on BFS algorithm[J]. Contemporary Chemical Industry, 2021, 50(1): 117-122. (in Chinese with English abstract) doi: 10.3969/j.issn.1671-0460.2021.01.028
[31] 王伟,张彦斐,宫金良,等. 基于蚁群-BFS算法的复杂环境下农业机器人全区域覆盖研究[J]. 华南农业大学学报,2021,42(3):119-125. doi: 10.7671/j.issn.1001-411X.202009027 WANG Wei, ZHANG Yanfei, GONG Jinliang, et al. Study on the whole area coverage of agricultural robot in complex environment based on ant colony-BFS algorithm[J]. Journal of South China Agricultural University, 2021, 42(3): 119-125. (in Chinese with English abstract) doi: 10.7671/j.issn.1001-411X.202009027
[32] 刘天湖,张迪,郑琰,等. 基于改进RRT*算法的菠萝采收机导航路径规划[J]. 农业工程学报,2022,38(23):20-28. doi: 10.11975/j.issn.1002-6819.2022.23.003 LIU Tianhu, ZHANG Di, ZHENG Yan, et al. Navigation path planning of the pineapple harvester based on improved RRT* algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(23): 20-28. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2022.23.003
[33] ZHAO L B, SHI G Y. A trajectory clustering method based on Douglas-Peucker compression and density for marine traffic pattern recognition[J]. Ocean Engineering, 2019, 172(15): 456-467.
[34] TANG C H, WANG H, ZHAO J H, et al. A method for compressing AIS trajectory data based on the adaptive-threshold Douglas-Peucker algorithm[J]. Ocean Engineering, 2021, 232(15): 1-13.
[35] 任诚. 基于径向约束与点位优化的Douglas-Peucker改良算法[J]. 地矿测绘,2017,33(4):5-7,38. REN Cheng. An improved Douglas-Peucker algorithm based on radial constraint and point optimization[J]. Surveying and Mapping of Geology and Mineral Resources, 2017, 33(4): 5-7,38. (in Chinese with English abstract)
[36] 刘建娟,薛礼啟,张会娟,等. 融合改进 A*与 DWA 算法的机器人动态路径规划[J]. 计算机工程与应用,2021,57(15):73-81. LIU Jianjuan, XUE Liqi, ZHANG Huijuan, et al. Robot dynamic path planning based on improved A* and DWA algorithm[J]. Computer Engineering and Applications, 2021, 57(15): 73-81. (in Chinese with English abstract)
-
期刊类型引用(5)
1. 刘祥,田敏,梁金艳. 基于RCH-UNet的新疆密植棉花图像快速分割及产量预测. 农业工程学报. 2024(07): 230-239 .  本站查看
本站查看
2. 赵玉,赵嘉滨,范雯婧,左强,吴训,盛建东,蒋平安,石建初. 基于作物水分亏缺指数和盐分淋洗系数的新疆棉田节水控盐优化方法. 农业工程学报. 2024(12): 96-108 . 本站查看
3. 张茜,徐强,刘洪光,龚萍,李鹏飞,夏汉基. 不同矿化度咸水滴灌对盐地碱蓬的生产性能与品质的影响. 草地学报. 2024(08): 2567-2574 . 百度学术
4. 郭典,李景彬,胡立庆,聂晶,杨朔,杨宏飞,张连生,周杰,冯玉刚. 基于轻量化YOLOv8的疵棉异性纤维检测算法研究. 石河子大学学报(自然科学版). 2024(06): 765-774 . 百度学术
5. 秦小婉,王振华,雷雨,张金珠,李文昊,马占利. 灌水量和矿化度对膜下滴灌棉花光合特性与产量的影响. 农业资源与环境学报. 2024(06): 1285-1294 . 百度学术
其他类型引用(6)










计量
- 文章访问数: 135
- HTML全文浏览量: 45
- PDF下载量: 54
- 被引次数: 11





