
Path tracking control method for 4WSS unmanned agricultural machinery based on disturbance observation
-
摘要:
为提高四轮独立自转向(four-wheel self-steering,4WSS)电驱动无人农机复杂农田环境下路径跟踪控制精度与抗扰动能力,该研究提出一种基于非线性扰动观测器的非奇异快速自适应终端滑模复合控制方法。首先,考虑到农田环境下驱动轮滑移对底盘运动规律的影响,建立包含未知侧滑速度与转向滑移角的4WSS无人农机底盘扩展运动学模型;其次,设计非线性扰动观测器,估计底盘扩展运动学模型中包含未知滑移参数的外部集总扰动,并引入到滑模面中进行扰动补偿。在此基础上,针对非奇异快速终端滑模控制的抖振问题,基于指数趋近律构建一种非线性自适应滑模趋近律,保证控制器输出转向执行机构可接受的平滑控制量,并严格证明了所提出复合控制器的稳定性。最后,分别在农田环境下进行直播作业和喷雾作业场地试验,结果表明:当4WSS无人农机以0.4和0.6 m/s的速度跟踪U形目标路径时,相较于传统非奇异快速终端滑模控制方法,直播作业模式下该方法在不同速度下目标作业路径跟踪的横向误差标准差分别为8.1和9.2 cm。喷雾作业模式下相应的横向误差标准差分别为5.3和7.8 cm。所提方法有效提高了复杂农田场景下4WSS无人农机路径跟踪控制的鲁棒性与精度,且具备良好的抗扰动能力和较强的自适应能力,满足农业生产的需求。
-
关键词:
- 控制 /
- 无人农机 /
- 路径跟踪 /
- 非线性扰动;观测器 /
- 非奇异快速自适应;终端滑模控制
Abstract:Agricultural and rural modernization has been ever accelerating with the promotion of rural revitalization strategy. The transformation of agriculture to intelligence, precision, and environmental protection has been the main trend of development in recent years. Among them, autonomous navigation of unmanned agricultural machinery has drawn much attention to effectively improve accuracy and efficiency. Path tracking control is one of the key technologies in the autonomous navigation of agricultural machinery. A lot of research has been done under relatively ideal working conditions. However, agricultural machinery has to operate in complex and various soil conditions, as well as highly unstructured farmland environments, such as muddy paddy fields, rugged slopes, and slippery grasslands. Agricultural machinery can inevitably encounter various uncertain disturbances during operation in these scenarios, leading to the low accuracy of path tracking and the stability of the control system. Therefore, anti-disturbance and strong self-adaptability are required in the autonomous navigation control of agricultural machinery. This study aims to improve the path following control accuracy and anti-disturbance ability of four-wheel self-steering (4WSS) electrically driven unmanned agricultural machinery in complex farmland environments. A control system of non-singular fast adaptive terminal sliding mode was also proposed using a nonlinear disturbance observer. Firstly, a 4WSS chassis extended kinematic tracking error model of unmanned agricultural machinery was established to consider the influence of drive wheel slip on the chassis motion in the farmland environment, including unknown sideslip speed and steering slip angle. Secondly, a nonlinear disturbance observer was designed to estimate the external lumped disturbance with unknown slip parameters, according to the chassis extended kinematic tracking error model. The disturbance compensation was introduced into the controller. A nonlinear adaptive sliding mode was also constructed to slow down the jitter problem of the nonsingular fast terminal sliding mode, according to the exponential approximation. The controller outputs confirmed the acceptable smooth control amount of the steering actuator. The stability of the composite controller was verified at the same time. Once the 4WSS unmanned agricultural machine tracked the U-shaped target path at 0.4 and 0.6 m/s, the standard deviation in the lateral error of the target operation path was reduced to 8.1 and 9.2 cm at different speeds, respectively, compared with the traditional. Furthermore, the standard deviation of lateral error was reduced to 5.3 and 7.8 cm, respectively, in spray mode. The robustness and accuracy of the path tracking control of 4WSS unmanned agricultural aircraft were effectively improved in the complex farmland environment. Better anti-disturbance and strong adaptive ability were achieved to meet the needs of agricultural production.
-
0. 引 言
生物炭是由生物质材料在完全或部分缺氧条件下,经过一定温度热解产生的难溶且稳定的富碳固体材料 [1]。生物炭表面含有丰富的含氧活性官能团、多孔结构、阳离子交换量、芳香性结构等使其对重金属具有较好的固持作用,进而在重金属污染环境修复中具有良好的应用前景[2-5]。热解温度对生物炭表面特征及吸附重金属离子的性能有重要影响[6-7],实际生产中生物炭热解制备方法有慢速热解法、快速热解法、气化法,目前较常用的生产模式为采用氮气做保护气的高温慢速热解法,但制备过程中保持高温热解(400~900 ℃)需消耗大量电力、燃气等能源且易产生温室气体,存在成本高、产率低等问题[8],在一定程度上限制了生物炭的推广与应用。因此,为了弥补高温热解技术的不足,低温限氧(200~400 ℃)热解制炭技术在节能减排的市场需求下应运而生。因热解过程中气体、温度等反应参数影响生物炭的表面结构及性能,与结构稳定、孔隙大、芳香性强[9]的高温生物炭相比,低温生物炭产率更高、结构复杂、具有更多的酸性基团,能为阳离子污染物提供更多的活性离子吸附位点[10],可弥补高温生物炭生产能耗大、碱性强、活性基团少[11]等不足,被逐渐应用到重金属稳定和修复领域。
生物炭的环境应用过程会伴随着氧化作用、温度和湿度差异、光照等因素变化,导致比表面积、官能团含量、表面结构等发生改变,并逐渐稳定,即为老化。虽然原位监测可以为生物炭在自然环境中的时间演化提供直接证据,然而由于生物炭在环境中自然老化是一个长期过程,无法短时间预期其效果和化学特征变化。因此,采用人工模拟老化的方法代替自然老化,从而缩短研究时间,预测生物炭在自然环境关键因素影响下几百年至数千年老化后的特性,为生物炭的长期环境应用提供参考。人工老化方法包括物理老化(冻融、干湿循环)、化学老化(化学氧化、有机酸诱导老化、光催化氧化)和生物老化(堆肥和厌氧发酵)。不同老化过程会引起生物炭对污染物吸附量的变化[12-13],WANG等[14]发现用过氧化氢氧化玉米秸秆生物炭后,由于表面络合作用使生物炭对Pb2+、Cd2+的吸附量增加;MENG等[15]发现稻草生物炭经过干湿交替和冻融循环处理后对Cd的吸附量增加。多项研究均说明了老化过程的复杂性,且单一的人工老化方法只能为生物炭特性的变化提供有限的理论支撑,缺少不同老化方式的影响及差异对比,因此须综合比较多种人工老化技术对生物炭性能的影响。而且,关于老化所引起的生物炭特性变化研究常以相似制备条件下获得的生物炭为研究对象,对不同制备条件下所获得的生物炭老化特征变化及其对金属阳离子的吸附性能影响尚未见明确分析。
基于此,本文以不同温度(200 ℃、500 ℃)、不同气氛(O2、N2)制备的小麦秸秆生物炭为研究对象,以重金属Cd2+为目标吸附离子,应用化学氧化、干湿交替、紫外光照3种老化方法代表自然界中最常见的氧气分子、降雨、光照对生物炭进行老化处理,模拟其在自然环境中经历的环境老化过程,通过扫描电镜(scanning electron micrograph,SEM)、比表面积分析(specific surface area analysis,SSA)、傅里叶红外光谱分析(Fourier transform infrared spectroscopy,FTIR)、热重分析(thermogravimetric analysis ,TG)等方法对老化生物炭的理化性质及重金属吸附能力变化进行详细解析,以阐明不同老化处理对两种生物炭表面结构、官能团含量、热稳定性和重金属吸附能力的影响,为推演自然环境下生物炭的老化作用对重金属稳定性的贡献及生物炭在自然环境中的长期应用提供理论指导。
1. 材料与方法
1.1 生物炭的制备
200 ℃的小麦秸秆生物炭制备以小麦秸秆为原料,自然晾干并粉碎后装进自制旋转炉内,在200 mL/min的普通氧气流量下,用3×300 W红外石英管加热至200 ℃,恒温持续3 h后停止加热,降温后关闭通气装置自然冷却至室温,获得低温生物炭。
500 ℃的小麦秸秆生物炭以小麦秸秆为原料,晾干、粉碎后装填到马弗炉中进行压实、充入氮气作为保护气后闭合设备, 红外石英管加热至500 ℃热解6 h后降至室温取出,获得高温生物炭。
本文中所有生物炭均过60目(0.25 mm)筛,保证所有处理生物炭颗粒均匀一致。
1.2 生物炭老化方法
1.2.1 生物炭氧化老化
称取一定量的低温生物炭、高温生物炭置于锥形瓶中,按照固液比1:10加入15%的H2O2溶液,80 ℃水浴加热6 h后将样品离心、过滤并用超纯水洗涤 2~3次。于105 ℃下烘干、研磨过60目(0.25 mm)筛后获得氧化老化低温生物炭、氧化老化高温生物炭。
1.2.2 生物炭干湿交替老化
将低温生物炭、高温生物炭在 25 ℃饱和水状态下培养10 h,于105 ℃快速烘干2 h,进一步在25 ℃下干燥器内放置12 h后对干燥样品重新补加去离子水至初始饱和状态,记为 1 轮干湿交替,历时24 h。干湿交替过程在恒温培养箱25 ℃下进行,保持相同的培养条件。14轮(历时14 d)干湿交替结束后取样[16],研磨过筛后获得干湿交替老化低温生物炭、干湿交替老化高温生物炭。
1.2.3 生物炭紫外光照老化
将低温生物炭、高温生物炭均匀平铺于玻璃培养皿中,放置于紫外灯管下(功率40 W、波长340 nm、辐照范围0.99 W/m2)10 cm处进行光氧化老化,每天采取光照12 h黑暗12 h的间歇式光照,老化培养环境条件为25 ℃,湿度60%,辐照20 d后[16]取样并干燥后获得紫外光照老化低温生物炭、紫外光照老化高温生物炭。
1.3 生物炭对Cd2+吸附试验
称取0.03 g过筛的生物炭样品于50 mL聚乙烯离心管中,加入30 mL浓度为 224 mg/L的氯化镉溶液于上述离心管。在180 r/min、25 ℃震荡24 h后以4000 r/min的转速离心10 min后过滤,使用火焰原子吸收分光光度计测定滤液中剩余Cd2+浓度计算生物炭对Cd2+的单位吸附量。生物炭对Cd2+的吸附量采用质量平衡方程进行计算:
q=[(C0−Ct)V]/m (1) 式中q为生物炭单位吸附量,mg/g;C0和 Ct分别为吸附前及吸附24 h后溶液中Cd2+的质量浓度,mg/L;V 为溶液体积,L;m 为生物炭用量,g。
1.4 生物炭的表征
利用扫描电镜(荷兰飞纳,Phenom Pro)观察生物炭表面形貌特征变化;利用比表面积及孔隙测定仪(中国金埃谱,V-Sorb 2800P)测定生物炭比表面积和孔隙结构;利用傅里叶变换红外光谱仪(美国赛默飞,Nicolet iS10)扫描并分析生物炭表面官能团,扫描范围为 500~4000 cm−1;利用pH计(上海梅特勒-托利多,FE20)测定生物炭浸提液pH值;利用自动电位滴定仪(上海雷磁,ZDJ-4B)测定生物炭表面酸碱基团含量;利用原子吸收分光光度计(日本岛津,AA-6880)测定吸附后滤液中Cd2+离子浓度。
1.5 数据统计与分析
使用Microsoft Excel 2019和OMNIC 8软件进行数据处理和统计分析,利用SPSS 25软件进行显著性分析,利用Origin 2021完成图表绘制。
2. 结果与分析
2.1 生物炭老化特征分析
2.1.1 扫描电镜(SEM)分析
生物炭老化前后的扫描电镜图像如图1所示。
![]() 图 1 生物炭老化前后的扫描电镜图注:LBC、OLBC、WLBC、ULBC分别为低温、氧化老化低温、干湿交替老化低温、紫外光照老化低温生物炭;HBC、OHBC、WHBC、UHBC分别为高温、氧化老化高温、干湿交替老化高温、紫外光照老化高温生物炭。下同。Figure 1. Scanning electron micrograph of original and aged biocharsNote: LBC, OLBC, WLBC, ULBC are low-temperature biochar, chemical oxidative aging low-temperature biochar, dry-wet cycles aging low-temperature biochar, and the UV light oxidative low-temperature biochar; HBC, OHBC, WHBC, UHBC are high-temperature biochar, chemical oxidative aging high-temperature biochar, dry-wet cycles aging high-temperature biochar, and the UV light oxidative high-temperature biochar. Same below.
图 1 生物炭老化前后的扫描电镜图注:LBC、OLBC、WLBC、ULBC分别为低温、氧化老化低温、干湿交替老化低温、紫外光照老化低温生物炭;HBC、OHBC、WHBC、UHBC分别为高温、氧化老化高温、干湿交替老化高温、紫外光照老化高温生物炭。下同。Figure 1. Scanning electron micrograph of original and aged biocharsNote: LBC, OLBC, WLBC, ULBC are low-temperature biochar, chemical oxidative aging low-temperature biochar, dry-wet cycles aging low-temperature biochar, and the UV light oxidative low-temperature biochar; HBC, OHBC, WHBC, UHBC are high-temperature biochar, chemical oxidative aging high-temperature biochar, dry-wet cycles aging high-temperature biochar, and the UV light oxidative high-temperature biochar. Same below.LBC因低温热解时生物炭炭化不充分,保留了小麦秸秆纤维管状结构,孔隙结构明显;随着热解温度升高,生物炭炭化程度增强使HBC结构破碎、表面粗糙,高温热解形成的灰分富集在表面从而形成更丰富的孔隙结构。
低温和高温生物炭化学氧化后仍保留着老化前的原始结构并出现了大量小孔隙,说明H2O2的强氧化作用不会破坏生物炭整体结构,但使生物炭表面结构发生分裂。干湿交替处理后生物炭表面片层结构破碎程度加重,与TAN等 [17]的研究结果一致,整体结构经过干湿交替后表面松散从而形成了更多孔隙;经过紫外光照氧化后两种生物炭表面产生细小裂纹并且孔隙结构变得光滑清晰。3种老化方式相比,氧化作用对生物炭表面孔隙结构的影响更明显,并且3种老化方法均未破坏生物炭的原始结构。
2.1.2 比表面积(SSA)及孔径分析
两种生物炭在老化前后的比表面积及孔径D分析如表1和图2所示。生物炭的孔隙结构可分为超微孔(D<2 nm)、微孔(2≤D<10 nm)、小孔(10≤D<50 nm)、中孔(50≤D<100 nm)及大孔(D≥100 nm)。低温生物炭孔隙整体分布在0~2.5 nm,主要为微孔结构,而高温生物炭主要为小孔结构(10~20 nm)。LBC、HBC的比表面积分别为0.78、11.43 m2/g,可见高温热解有利于提高生物炭比表面积。分析原因为随着热解温度的升高,生物质内高聚物发生解聚和脱氢反应,不稳定易挥发组分逐渐消失,不稳定碳结构逐渐向片状晶体结构转变,形成更小的孔隙从而增大生物炭的比表面积[18]。
表 1 生物炭老化前后的比表面积变化Table 1. Changes in specific surface area of original and aged biochars处理Treatment 比表面积Specific surface area/ (m2·g−1) LBC 0.78 OLBC 7.65 WLBC 1.44 ULBC 0.15 HBC 11.43 OHBC 15.70 WHBC 8.09 UHBC 1.80 无论低温生物炭、高温生物炭,经H2O2强氧化作用后材料被破坏,颗粒尺寸发生变化。同时,H2O2会溶解生物炭上的部分不稳定碳,并从孔隙中去除矿物质,从而增加比表面积。因此,经化学氧化老化后OLBC、OHBC的比表面积均较初始生物炭增大,比老化前分别提高了8.81和0.37倍。干湿交替老化过程使WLBC比表面积由0.78 m2/g增加到1.44 m2/g,低温生物炭具有较高的活性有机质和较低的固定碳含量,碳骨架经过老化后呈现较高的孔隙度[19]。经干湿交替老化后WHBC比表面积较HBC降低29.22%,水分的交替变化使孔隙结构被溶解性有机物堵塞,无机矿物的溶解和再沉淀也是造成孔隙堵塞的重要原因[20]。紫外光照能够破坏生物炭的孔隙结构,因此ULBC、UHBC的比表面积比老化前分别下降了80.77%、84.25%,而李桥等[21]的研究表明紫外辐照后椰壳生物炭的比表面积增幅为20.50%~41.80%,这可能与生物炭原材料及紫外光照方式不同有关。此外,孔径分析结果表明(图2),老化作用使低温生物炭的小孔数量增多,OLBC、WLBC、ULBC的孔径为2.50~26.80 nm;而H2O2强氧化作用使OHBC的微孔(1.32~9.50 nm)数量增加,OHBC、WHBC、UHBC的孔径为18.30~41.00 nm小孔结构,主要由于碳损失和碳架断裂收缩形成。综上,与生物炭材料干湿交替的水分变化影响相比,氧化老化对生物炭孔隙结构的破坏作用更明显,并且由于H2O2和紫外线两种氧化剂的性质不同导致生物炭比表面积增大或减小,与SEM观察到的结果一致。
2.1.3 红外光谱及官能团含量变化
生物炭老化前后的红外光谱信息如图3所示。生物炭由不稳定碳、稳定碳和无机组分构成,其中不稳定碳和无机组分受热解温度影响较大,红外光谱中出现的3720、3633 cm−1左右处的峰属于酚羟基,随着生物炭裂解温度升高,LBC 3720 cm−1处酚羟基伸缩振动移位到HBC的3633 cm−1左右,是由于纤维素类物质随温度升高逐渐碳化,其所含有的-OH键发生缔合或者脱落导致 [22]。经不同老化方式处理后,不同热解温度下制备生物炭的特征峰强度变化差异明显。3351、3348 cm−1处的峰属于分子间缔合的氢键醇、酚的羟基伸缩振动峰,OLBC、ULBC及所有老化高温生物炭中该峰均消失。1778~1652 cm−1波段的峰属于C=O伸缩振动,是羧酸基团中酯键的特征峰,高温炭的C=O峰经过3种老化后均消失;1439、1446 cm−1处的峰是典型芳香碳,反映了生物炭具有的芳香化结构,老化导致高温炭的芳香碳峰强减弱甚至消失;1216、1218 cm−1处的峰为C-O,低温炭经过紫外老化该峰波段变宽,而3种老化高温炭中该峰均消失;1050~1150 cm−1处为脂肪族C-O-C键,为LBC经过化学氧化和干湿交替老化后的新衍生峰。LBC中926 cm−1处的-OH峰经老化后脱落。500~900 cm−1之间的吡啶、吲哚等芳香化和杂环化合物振动峰明显,表明生物炭具有高度芳香化和杂环化的结构,这为生物炭发生阳离子−π键吸附作用提供了基础[23]。
![]() 图 3 生物炭老化前后的红外光谱Figure 3. Fourier transform infrared spectroscopy of original and aged biochars
图 3 生物炭老化前后的红外光谱Figure 3. Fourier transform infrared spectroscopy of original and aged biochars生物炭老化前后的官能团数量变化如表2所示,结合红外光谱图对官能团变化进行分析。综合分析,因低温生物炭在通氧条件下热解,形成更多的含氧官能团,低温生物炭的酸性基团数量较多,高温的热解温度促进秸秆的炭化程度,故高温生物炭表面所含官能团种类及数量较低温生物炭减少[24]。
表 2 生物炭的各基团含量变化Table 2. Functional groups amount of original and aged biochars处理
Treatment碱性基团
Basic
groups/
(mmol·g−1)酸性基团
Acidic
group /
(mmol·g−1)羧基
Carboxyl /
(mmol·g−1)内酯基
Lactone group /
(mmol·g−1)酚羟基
Phenolic hydroxyl /
(mmol·g−1)LBC 0.02±0.01 c 3.77±0.06 b 0.67±0.03 b 0.97±0.06 b 2.13±0.03 a OLBC 0.01±0.01 d 4.16±0.12 a 1.74±0.05 a 2.16±0.10 a 0.26±0.03 d WLBC 0.31±0.01 a 2.13±0.06 d 0.54±0.02 c 0.77±0.01 c 0.82±0.01 c ULBC 0.13±0.01 b 3.12±0.02 c 0.61±0.02 c 0.96±0.02 b 1.55±0.04 b HBC 1.26±0.04 a 1.05±0.04 b 0.05±0.00 d 0.03±0.01 d 0.97±0.03 a OHBC 0.71±0.01 d 1.52±0.02 a 0.33±0.03 a 0.29±0.04 a 0.90±0.01 b WHBC 0.84±0.02 b 0.06±0.01 d 0.14±0.00 c 0.12±0.01 c / UHBC 0.76±0.01 c 0.28±0.03 c 0.21±0.02 b 0.21±0.00 b / 注:“/”代表未检出。不同小写字母分别表示高温或低温生物炭组别中4个处理间差异显著(P<0.05)。下同。 Note: “/” means not detected. The different lowercase letters indicate significant differences between four treatments in high-temperature or low-temperature biochar groups (P<0.05). Same below. 经化学氧化处理后,低温生物炭和高温生物炭碱性基团数量显著降低(P<0.05),酸性基团数量增多,OLBC、OHBC的碱性基团数量较老化前降幅分别为87.78%、43.93%;酸性基团数量分别显著增长了10.53%、44.05%,其中羧基、内酯基的数量增多。MIA等[25]用H2O2处理模拟长期氧化对生物炭的影响,也发现生物炭表面含氧官能团增多,其研究结果与本文一致。经过干湿交替老化作用和紫外光照老化作用后,低温生物炭的碱性基团数量显著增多,酸性基团总量降幅为17.29%~43.36%,羧基及内酯基数量也显著减少;而高温生物炭碱性基团、酸性基团数量均减少,其中含氧官能团数量降幅为73.30%~94.68%。3种老化方式相比,化学氧化老化对生物炭表面含氧官能团的影响较大。
2.1.4 热稳定性分析
两种生物炭热重分析结果如图4所示。热重分析温度分为4个区间,其中20~210 ℃与水分蒸发有关, 211~420 ℃主要是碳水化合物的热解,421~570 ℃是芳香族化合物的热解, 571~800 ℃与生物炭中无机物的转化有关。
![]() 图 4 生物炭老化前后的热重分析图Figure 4. Thermogravimetric analysis chart of original and aged biochars
图 4 生物炭老化前后的热重分析图Figure 4. Thermogravimetric analysis chart of original and aged biochars对于原始及老化处理后的低温生物炭,由于纤维素、半纤维素大量分解和木质素软化及含氧官能团的热解,其质量损失主要在区域Ⅱ的290~325 ℃之间,这与FAN等[26]的研究结果一致。LBC、OLBC、WLBC、ULBC的质量损失分别为57.17%、60.69%、57.50%、57.12%。对不同老化方式对生物炭热稳定性影响分析,由于化学氧化过程中生物炭表面增加的含氧官能团易随热重分析温度升高而热解损失,造成化学氧化后生物炭的热稳定性明显降低,而干湿交替老化和紫外老化处理低温生物炭的热稳定性未发生明显改变。
高温生物炭在热重升温过程中较稳定,最大质量损失主要在温度446~460和660~680 ℃之间,归因于芳香族化合物的热解以及无机矿物组分的转化和降解,HBC、OHBC、WHBC、UHBC的质量损失分别为8.19%、6.93%、5.87%、5.00%,3种老化处理均使高温炭热稳定性增强。
2.1.5 pH值变化
LBC、HBC两种炭老化前后的pH值如表3所示。低温生物炭在通氧条件下热解,生物炭表面的酸性含氧官能团较多,导致其呈现酸性特征,pH值为4.65;而高温限氧条件下热解的生物炭,较高的生产温度导致生物炭的酸性官能团(如羧基和酚羟基)分解,并形成一些碱性矿物(如K2O)[27],获得碱性生物炭(pH值为9.05)。
表 3 生物炭老化前后的pH值及Cd2+吸附量变化Table 3. pH value and Cd2+ adsorption capacity of original and aged biochars处理
TreatmentpH值
pH value吸附量
Adsorption capacity/ (mg·g−1)LBC 4.56±0.01 b 3.49±0.32 c OLBC 2.50±0.01 c 20.92±0.23 a WLBC 4.52±0.02 b 4.73±0.57 c ULBC 4.65±0.01 a 18.71±0.15 b HBC 9.05±0.09 c 2.62±0.91 b OHBC 7.44±0.01 d 23.53±2.28 a WHBC 9.88±0.02 b 5.97±0.93 b UHBC 9.99±0.02 a 22.72±1.46 a 分析3种老化方式对生物炭pH值影响发现,H2O2氧化可以降低生物炭的pH值,OLBC、OHBC的pH值较老化前分别降低了2.06、1.61,结合生物炭表面含氧官能团数量变化分析(表3),生物炭经H2O2老化过程中发生C-C、C-H键的氧化作用,促进C-O和C=O的生成,含氧酸性官能团数量分别提高了10.53%、44.05%,导致其pH值降低, HALE等[20]也认为老化生物炭表面生成的含氧官能团(-COOH和C=O)是其酸性增加主要原因。其次,生物炭表面芳香基团在H2O2作用下分解为低分子有机酸,增加生物炭表面酸性基团含量,降低生物炭的碱度[28]。
经过干湿交替老化,WLBC的pH值从老化前的4.56降低到4.52,WHBC从9.05升高到9.88,高温炭与低温炭的pH值呈现出相反的变化趋势,低温炭pH值降低可能是由于不稳定的有机碳在干湿交替过程中分解成低分子量有机酸,并且生物炭暴露在空气中可能吸附二氧化碳,形成新的碳酸盐,降低生物炭的碱度,如XU等[29]研究结果表明麦秸生物炭可吸附CO2诱导CaCO3转化为可溶性Ca(HCO3)2,显著增加可溶性无机碳,使pH值下降。对于高温生物炭,干湿交替老化处理过程中水分变化使其所含的一些无机金属离子(Al3+、Mg2+、Fe3+)与氢氧根结合形成沉淀导致pH值升高。
生物炭表面经过紫外光照过程发生氧化反应,导致生物炭表面氧和水分的非生化吸附增加[17],故ULBC、UHBC的pH值较未老化处理前分别升高了0.09、0.94。除此之外,经紫外老化后生物炭表面酸碱基团数量变化也是造成pH值波动的原因之一。
2.2 生物炭老化前后对Cd2+吸附量变化
生物炭老化过程中其表面元素组成、含氧官能团以及形貌特征等均发生不同程度的改变,从而影响生物炭对重金属的吸附量。通过表3中生物炭老化前后对Cd2+的吸附量发现, LBC对Cd2+的吸附性能强于HBC,已有研究表明,生物炭对污染物的吸附机制随其热解温度变化而变化[30]。结合本研究中生物炭的理化性质分析,LBC表面丰富的羟基、羧基等含氧官能团与重金属阳离子的交换和络合反应构成了LBC的主要吸附机理;HBC呈碱性,并且其含有的无机组分如磷酸根、碳酸根等易与金属离子发生共沉淀作用,形成相对稳定的晶体或矿物晶体进而降低重金属离子的移动性,因此HBC对 Cd2+的主要吸附机制是矿物共沉淀、阳离子交换和阳离子−π键共同作用[29]。
3种老化作用均提高了两种生物炭的Cd2+吸附量,吸附量提高效果从高到低依次为化学氧化、紫外光照、干湿交替,并且化学氧化和紫外光照氧化可显著提高生物炭的吸附能力(P<0.05)。经过化学氧化作用,OLBC、OHBC的Cd2+吸附量分别增加498.95%、799.36%。分析原因为化学氧化后,OLBC、OHBC的比表面积分别扩大8.81、0.37倍,含氧官能团数量分别增长10.53%、44.05%,生物炭的比表面积增加和羧基、羟基等含氧官能团数量增多,促进生物炭表面芳香碳、羧基碳与π电子结合[31],为生物炭提供有效的 Cd2+结合位点。经过紫外光照老化ULBC、UHBC的Cd2+吸附量分别显著增长436.10%、768.43%,结合前文的研究结果,当暴露于紫外线辐射时,生物炭经历一系列的光氧化反应,吸附量增多更大程度上归因于化学吸附。经过干湿交替老化,WLBC、WHBC对Cd2+的吸附量分别增长35.53%、128.10%,低温生物炭吸附能力增强与干湿交替过程中孔隙增大以及吸附位点增多有关,孔隙分析结果表明WLBC与老化前的微孔结构相比其小孔结构增多,并且干湿交替过程中生物炭表面溶解有机或无机组分不断减少,释放了部分阳离子吸附位点,增加了吸附位点的可给性;而高温炭吸附量增多主要归因于干湿交替过程中生物炭表面盐基离子溶出后与Cd2+之间的离子交换作用。除含氧官能团、吸附位点变化及pH值的作用外,SEM结果(图1)表明经过3种老化作用的生物炭表面粗糙、结构破碎也有利于吸附固定Cd2+。
3. 结 论
1)不同温度及气氛下制备的生物炭性质不同。低温生物炭含有更多的含氧官能团,而高温热解技术制备生物炭会促进生物炭孔隙结构的发育进而提高其比表面积。不同类型的生物炭经老化作用后表面形貌均发生破碎并导致孔隙结构发生相应变化。
2)化学氧化使生物炭比表面积分别增加8.81和0.37倍,含氧官能团增幅为10.53%~44.05%;而干湿交替和紫外光照老化过程能够使生物炭表面酸性基团数量减少,含氧官能团数量降幅分别为43.36%~94.68%、17.29%~73.30%。
3)老化处理增加了生物炭对Cd2+的吸附量,3种老化方法对生物炭吸附性能的提升作用从大到小依次为化学氧化、紫外光照、干湿交替。老化作用主要通过改变生物炭表面粗糙程度、吸附位点的数量以及与羟基、羧基等官能团的络合作用来显著改变生物炭对Cd2+吸附。
4)3种老化方式相比,化学氧化对生物炭理化性质及Cd2+吸附能力的提升作用更明显,说明与其他因素相比,自然环境中的氧分子、根系分泌物等氧化作用对生物炭的改变作用更强。
-
![]()
图 1 4WSS无人农机底盘结构
Figure 1. 4WSS(four-wheel self-steering) unmanned agricultural machinery chassis structure
![]()
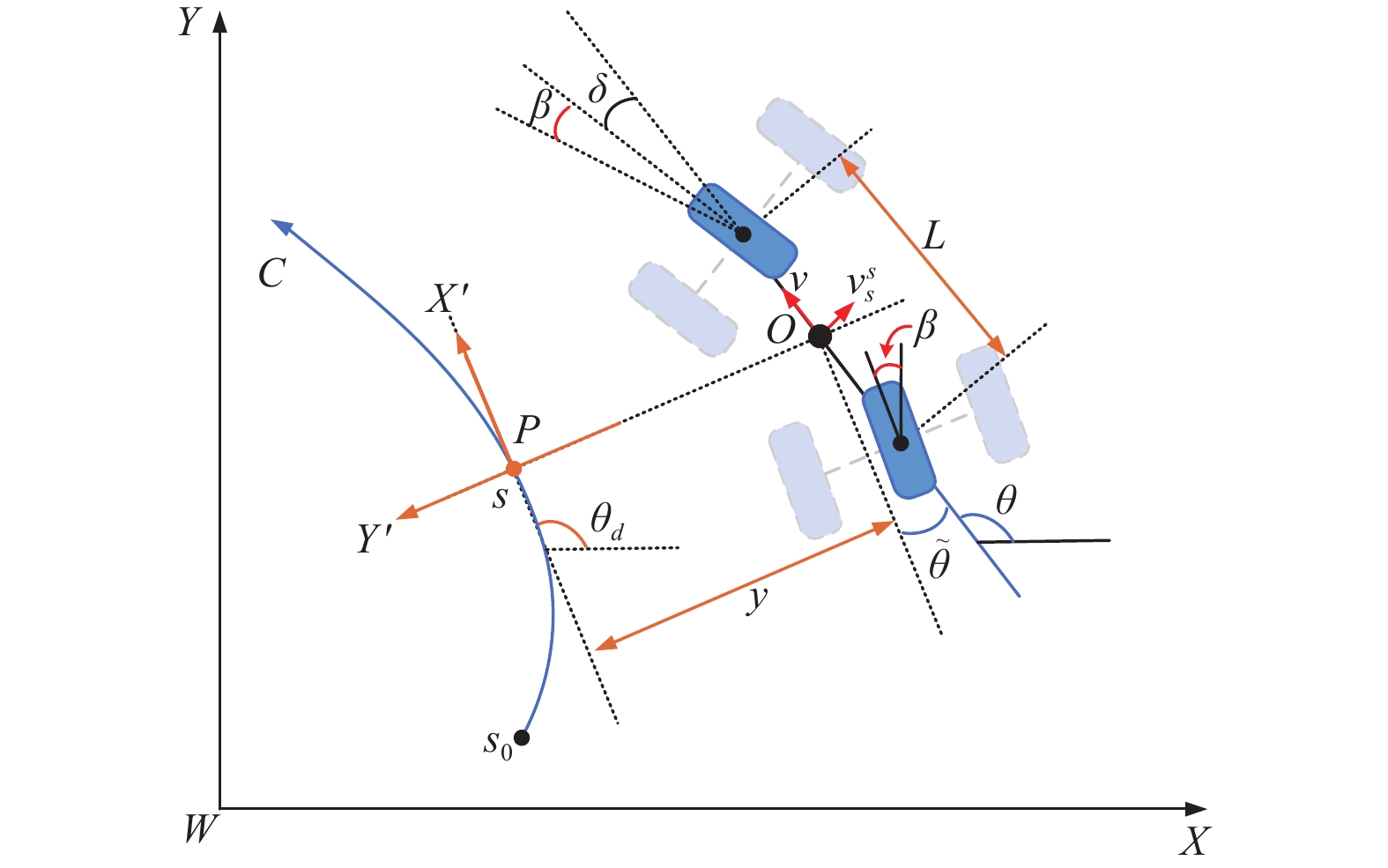
图 2 4WSS无人农机运动学模型
注:YWX为惯性坐标系;C为参考路径;O为车体质心;P为O在C上的投影点;Y ' 是P处路径C的法线;X ' 是P处路径C的切线;y为O和P之间的横向误差,cm;s为C从初始位置到P点的曲线弧长;s0是C的初始位置;L为轴距,m;v为车体速度,m⋅s−1;δ为前轮转向角,rad;θ为航向角,rad;θd为目标航向,rad;˜θ为航向误差,rad;vss为横向滑移速度,m⋅s−1;β为滑移角,rad。
Figure 2. 4WSS unmanned agricultural machinery kinematic model
Note: YWX is the inertial coordinate system; C is the reference path; O is the vehicle mass centre; P is the orthogonal projection piont of O on C; Y ' is the normal line of C at P; X ' is the tangent line of C at P; y is the lateral deviation between O and P, cm; s is the arc-length of C from an initial position to point P; s0 is the initial position of C; L is the wheelbase, m; v is vehicle speed, m⋅s−1; δ steering angle of front wheels, rad; θ is the heading angle, rad; θd is the target heading angle, rad; ˜θ is the heading error, rad; vss is transverse slip velocity, m·s−1; β is the slip angle, rad.
![]()
图 6 4WSS无人农机自主导航控制系统
Figure 6. 4WSS unmanned agricultural machinery autonomous navigation control system
-
[1] 罗锡文,廖娟,胡炼,等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报,2021,42(6):8-17. doi: 10.7671/j.issn.1001-411X.202108040 LUO Xiwen, LIAO Juan, HU Lian, et al. Research progress of intelligent agricultural machinery and practice of unmanned farm in China[J]. Journal of South China Agricultural University, 2021, 42(6): 8-17. (in Chinese with English abstract) doi: 10.7671/j.issn.1001-411X.202108040
[2] 史扬杰,程馨慧,奚小波,等. 农业机械导航路径跟踪控制方法研究进展[J]. 农业工程学报,2023,39(15):1-14. doi: 10.11975/j.issn.1002-6819.202304004 SHI Yangjie, CHENG Xinhui, XI Xiaobo, et al. Research progress on the path tracking control methods for agricultural machinery navigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(15): 1-14. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.202304004
[3] 吴才聪,吴思贤,文龙,等. 拖拉机自动导航变曲度路径跟踪控制[J]. 农业工程学报,2022,38(21):1-7. doi: 10.11975/j.issn.1002-6819.2022.21.001 WU Caicong, WU Sixian, WEN Long, et al. Variable curvature path tracking control for the automatic navigation of tractors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(21): 1-7. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2022.21.001
[4] 兰玉彬,赵德楠,张彦斐,等. 生态无人农场模式探索及发展展望[J]. 农业工程学报,2021,37(9):312-327. doi: 10.11975/j.issn.1002-6819.2021.09.036 LAN Yubin, ZHAO Den'an, ZHANG Yanfei, et al. Exploration and development prospect of eco-unmanned farm modes[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 312-327. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2021.09.036
[5] 沈跃,张亚飞,刘慧,等. 农业装备自动控制技术研究综述[J]. 农业机械学报,2023,54(8):1-18. doi: 10.6041/j.issn.1000-1298.2023.08.001 SHEN Yue, ZHANG Yafei, LIU Hui, et al. Research on the research on automatic control of agricultural equipment[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(8): 1-18. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2023.08.001
[6] 李革,王宇,郭刘粉,等. 插秧机导航路径跟踪改进纯追踪算法[J]. 农业机械学报,2018,49(5):21-26. doi: 10.6041/j.issn.1000-1298.2018.05.002 LI Ge, WANG Yu, GUO Liufen, et al. The navigation path tracking path tracking and improving pure tracking algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 21-26. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2018.05.002
[7] 沈跃,赵莎,张亚飞,等. 基于变前视距离的四轮同步转向农机改进纯跟踪控制[J]. 农业机械学报,2024,55(3):1-9. doi: 10.6041/j.issn.1000-1298.2024.03.001 SHEN Yue, ZHAO Sha, ZHANG Yafei, et al. The four-wheel synchronization of the forefront-based distance to agricultural machinery improvement pure tracking control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(3): 1-9. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2024.03.001
[8] 崔冰波,孙宇,吉峰,等. 基于模糊Stanley模型的农机全田块路径跟踪算法研究[J]. 农业机械学报,2022,53(12):43-48. doi: 10.6041/j.issn.1000-1298.2022.12.004 CUI Bingbo, SUN Yu, JI Feng, et al. The study based on the field of farm machinery of agricultural machinery based on blurring Stanley model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(12): 43-48. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2022.12.004
[9] WANG L, ZHAI Z, ZHU Z, et al. Path tracking control of an autonomous tractor using improved stanley controller optimized with multiple population genetic algorithm[J]. Actuators, 2022, 11(1): 22. doi: 10.3390/act11010022
[10] 丁幼春,夏中州,彭靖叶,等. 联合收获机单神经元PID导航控制器设计与试验[J]. 农业工程学报,2020,36(7):34-42. doi: 10.11975/j.issn.1002-6819.2020.07.004 DING Youchun, XIA Zhongzhou, PENG Jingye, HU Ziqian. Design and experiment of the single-neuron PID navigation controller for a combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(7): 34-42. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2020.07.004
[11] 丁幼春,何志博,夏中州,等. 小型履带式油菜播种机导航免疫PID控制器设计[J]. 农业工程学报,2019,35(7):12-20. doi: 10.11975/j.issn.1002-6819.2019.07.002 DING Youchun, HE Zhibo, XIA Zhongzhou, et al. Design of navigation immune controller of small crawler-type rape seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(7): 12-20. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2019.07.002
[12] 张亮修,吴光强,郭晓晓. 自主车辆线性时变模型预测路径跟踪控制[J]. 同济大学学报:自然科学版,2016,44(10):1595-1603. ZHANG Liangxiu, WU Guangqiang, GUO Xiaoxiao. Path tracking using linear time-varying model predictive control for autonomous vehicle[J]. Journal of Tongji University: Natural Science, 2016, 44(10): 1595-1603. (in Chinese with English abstract)
[13] 刘文龙,郭锐,赵静一. 基于预瞄模型的农机路径跟踪预测控制方法[J]. 农业工程学报,2023,39(17):39-50. doi: 10.11975/j.issn.1002-6819.202303109 LIU Wenlong, GUO Rui, ZHAO Jingyi. Predictive control method for the path tracking of agricultural machinery based on preview model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(17): 39-50. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.202303109
[14] HAN Y, LI P, ZHENG Z Q. Sliding-mode and back-stepping control for output tracking systems with unmatched uncertainties via a disturbance observer[J]. International Workshop on Variable Structure Systems. 2016,14(59): 308-311.
[15] FANG H, FAN R, THUILOT B, et al. Trajectory tracking control of farm vehicles in presence of sliding[J]. Robotics and Autonomous Systems. 2006, 54(10): 828-839.
[16] 焦俊,陈靖,乔焰,等. 直流电机驱动农用履带机器人轨迹跟踪自适应滑模控制[J]. 农业工程学报,2018,34(4):64-70. doi: 10.11975/j.issn.1002-6819.2018.04.008 JIAO Jun, CHEN Jing, QIAO Yan, et al. Adaptive sliding mode control of trajectory tracking based on DC motor drive for agricultural tracked robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 64-70. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2018.04.008
[17] MATVEEV AS, HOY M, KATUPITIYA J, et al. Nonlinear sliding mode control of an unmanned agricultural tractor in the presence of sliding and control saturation[J]. Robotics and Autonomous Systems, 2013, 61: 973-987. doi: 10.1016/j.robot.2013.05.003
[18] 景亮,张亚飞,沈跃,等. 四轮独立驱动高地隙无人喷雾机轨迹跟踪自适应控制[J]. 农业机械学报,2021,52(12):408-416. doi: 10.6041/j.issn.1000-1298.2021.12.043 JING Liang, ZHANG Yafei, SHEN Yue, et al. Adaptive trajectory tracking control of 4WID high clearance unmanned sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(12): 408-416. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2021.12.043
[19] XIN L J, WANG Q L, SHE J H, et al, Robust adaptive tracking control of wheeled mobile robot[J]. Robotics and Autonomous Systems, 2016, 78: 36-48.
[20] 黄文岳,魏新华,汪岸哲,等. 基于模糊快速滑模的农用牵引车辆直线路径跟踪控制[J]. 农业机械学报,2024,55(2):415-422. doi: 10.6041/j.issn.1000-1298.2024.02.041 HUANG Wenyue, WEI Xinhua, WANG Anzhe, et al. The direct line path of the agricultural traction vehicle based on blurred and fast-moving models is tracked and controlled[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(2): 415-422. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2024.02.041
[21] 姜龙腾,迟瑞娟,李青君,等. 基于滑模变结构的农机路径跟踪控制算法研究[J]. 农机化研究,2024,46(2):229-234. doi: 10.3969/j.issn.1003-188X.2024.02.041 JIANG Longteng, CHI Ruijuan, LI Qingjun, et al. The study of the agricultural machine path tracking control algorithm based on sliding mold changes[J]. Journal of Agricultural Mechanization Research, 2024, 46(2): 229-234. (in Chinese with English abstract) doi: 10.3969/j.issn.1003-188X.2024.02.041
[22] YAO M B, XIAO X M, TIAN Y, et al. A fast terminal sliding mode control scheme with time-varying sliding mode surfaces[J]. Journal of the Franklin Institute, 2021, 358(10): 5386-5407. doi: 10.1016/j.jfranklin.2021.05.006
[23] SHAO X Y, SUN G H, XUE C, et al. Nonsingular terminal sliding mode control for free-floating space manipulator with disturbance[J]. Acta Astronautica, 2021, 181: 396-404. doi: 10.1016/j.actaastro.2021.01.038
[24] MOBAYEN S, MOSTAFAVI S, FEKIH A. Non-singular fast terminal sliding mode control with disturbance observer for underactuated robotic manipulators[J]. IEEE Access, 2020, 8: 198067. doi: 10.1109/ACCESS.2020.3034712
[25] ANH T V, THANH N T, HEE J K. A novel tracking control algorithm with finite-time disturbance observer for a class of second-order nonlinear systems and its applications[J]. IEEE Access, 2021, 9: 31373-31389.
[26] YIN C Q, WANG S R, LI X W, et al. Trajectory tracking based on adaptive sliding mode control for agricultural tractor[J]. IEEE Access, 2020, 8: 113021-113029.
[27] 李艳,孙蕊. 基于新型变指数趋近律的智能小车轨迹跟踪[J]. 科学技术与工程,2021,21(35):15114-15122. doi: 10.3969/j.issn.1671-1815.2021.35.031 LI Yan, SUN Rui. Intelligent vehicle tracking based on new approach law of variable exponentials[J]. Science Technology and Engineering, 2021, 21(35): 15114-15122. (in Chinese with English abstract) doi: 10.3969/j.issn.1671-1815.2021.35.031
[28] TAGHIA J, WANG X, LAM S, et al. A sliding mode controller with a nonlinear disturbance observer for a farm vehicle operating in the presence of wheel slip[J]. Autonomous Robots. 2013, 41: 71–88.
[29] 武涛,李彦明,林洪振,等. 基于干扰观测器的直播机路径跟踪快速终端滑模控制[J]. 农业机械学报,2021,52(12):24-31. doi: 10.6041/j.issn.1000-1298.2021.12.003 WU Tao, LI Yanming, LIN Hongzhen, et al. Fast terminal sliding mode control for autonomous rice seeding machine based on disturbance observer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(12): 24-31. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2021.12.003
[30] HE S W, SHEN Y, ZHANG Y F, et al. Development and evaluation of 4WSS electric-driven chassis for high-clearance sprayer[J]. Frontiers in Plant Science, 2023, 14: 1258744.
[31] CHEN W H, YANG J, GUO L, et al. Disturbance observer-based control and related methods: An overview [J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083–1095.
[32] WANG B H, MI G S. Nonsingular fast terminal sliding mode control for manipulator based on combinatorial reaching law[J]. Journal of Physics: Conference Series, 2022, 2170(1): 012026. doi: 10.1088/1742-6596/2170/1/012026
[33] XU B, ZHANG L, JI W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives[J]. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2753-2762.
[34] AGHABALA M P, AKBARI M E. A chattering-free robust adaptive sliding mode controller for synchronization of two different chaotic systems with unknown uncertainties and external disturbances[J]. Applied Mathematics and Computation, 2012, 218(9): 5757-5768. doi: 10.1016/j.amc.2011.11.080
[35] 黄开宏,杨兴锐,曾志文,等. 基于ROS户外移动机器人软件系统构建[J]. 机器人技术与应用,2013(4):37-41. doi: 10.3969/j.issn.1004-6437.2013.04.008 HUANG Kaihong, YANG Xingrui, ZENG Zhiwen, et al. Construction of outdoor mobile robot software system based on ROS[J]. Robotic Technology and Application, 2013(4): 37-41. (in Chinese with English abstract) doi: 10.3969/j.issn.1004-6437.2013.04.008

 下载:
下载:











计量
- 文章访问数: 144
- HTML全文浏览量: 32
- PDF下载量: 53





