
Design and experimentation of a chain reversal trenching and fertilization device for vineyard organic fertilizer
-
摘要:
针对葡萄园有机肥施用深度浅,施肥不均匀等问题,该研究设计了一种链式反转开沟施肥机。该机采用先切后抛的形式,实现开沟施肥回填一体化作业,开沟深度为600 mm,通过理论分析确定了影响切土角的关键参数,构建了正置和侧置式两种施肥模式的仿真模型,并分析了两种模式的排肥规律。通过单因素试验,分析了刮板高度、角度和间距对法向接触力和变异系数的影响,并优选了刮板高度、角度和间距,分别为20 mm,90°和180 mm。田间试验表明,排肥变异系数为8.34%,与仿真结果的误差为2.32个百分点,排肥量为0.8~6 kg/m;两次试验的开沟深度稳定性系数分别为93.57%和92.58%,开沟宽度一致性系数分别为96.16%和95.04%,满足农艺要求。研究结果可为其他果园施肥机设计提供理论参考。
Abstract:Fertilizer application has been one of the most important facilities to advance agricultural mechanization. Particularly, manual fertilization cannot fully meet the large-scale production in recent years. In this article, a chain reversal trenching and application device was presented for the organic fertilizer in orchards, in order to enhance the trenching depth and uniform fertilization. A reverse-chain trenching mechanism was employed with a fixed trenching blade that moved in the opposite direction of the chain. The soil cutting and simultaneous backfilling were allowed within the trench, as the device progressed. A trenching depth of up to 600mm was achieved in the chain trenching mechanisms. The separate backfilling was reduced to leave no visible trenches on the surface after completion. This design was also a streamlined operation. The mathematical analysis of the trenching blade was conducted to establish a mathematical model using Cartesian coordinate transformations. The relationship equation was derived for the cutting angle. Optimal angle parameters were also provided. According to the trenching depth analysis, the hydraulic adjustment cylinders were selected for the trenching device. A scraper-type fertilizer application mechanism was adopted to develop the discrete element simulation models for both upright and sideways fertilizer application modes. The fertilizer distribution patterns were analyzed under the two modes. While both modes were similarly distributed fertilizer, and the forward-facing mode was more suitable for the operations with the larger fertilizer widths, while the sideward-facing mode was with the smaller fertilizer widths. In the two fertilizer application modes, the sideways application mode had better uniformity, especially at the lower forward speeds. Therefore, the application mode of sideward-facing fertilizer was selected to ensure that all organic fertilizer accurately fell into the trench. A single-factor experiment was carried out to explore the effects of scraper height, angle, and spacing on the normal contact force and coefficient of variation. All three parameters shared a significant impact on the coefficient of variation. In a coefficient of variation of less than 15%, the optimal height, angle, and spacing of the scraper were selected to minimize the normal contact force, resulting in values of 20 mm, 90°, and 180 mm, respectively. According to these optimal parameters of the scraper, the simulation was conducted to yield a coefficient of variation of 6.02% and a normal contact force of 9.03 N, both of which were lower than those before optimization. Subsequently, a physical prototype was fabricated and field-tested. An average coefficient of variation of 8.34% was obtained for fertilizer distribution, indicating better uniformity. Furthermore, the maximum and minimum fertilizer application tests showed that the quantities ranged from 0.8 to 6 kg/m, thus meeting the fertilization requirements of different plots. The trenching performance tests show that the average trenching depths of two operations were 616.0 and 624.4 mm, respectively, with stability coefficients of 93.57% and 92.58%, respectively, both exceeding 90%. The average trenching widths were 305.4 and 295.4 mm, respectively, with consistency coefficients of 96.16% and 95.04%, respectively, both exceeding 95%. Therefore, the device exhibited excellent performance in the fertilizer distribution and trenching operations, fully meeting the agronomic requirements. The findings can provide a new tool for the deep application of organic fertilizers in orchards, indicating the promising potential prospects. Innovative design and efficiency can also offer valuable insights into the agricultural fields.
-
Keywords:
- organic fertilizer /
- grapes /
- orchard /
- fertilization /
- reverse rotation /
- scraper /
- trenching blade
-
0. 引 言
随着公众健康意识的普遍提高以及生活水平的不断提升,海参作为一种高营养价值的海洋珍品,在当前市场中获得了广泛的关注和重视。在海洋珍品养殖过程中,养殖户需要各类重要的信息来评估海洋珍品的生长状态以及它们对养殖环境的适应性[1-3]。因此,进行阶段性的数据观测具有极其重要的意义。然而,传统的观测方法存在诸多局限性。以海参为例,养殖户通常需要派遣潜水员潜入水下,近距离观测和接触海参,以此来近似估计海参的尺寸、体积等信息。首先,这种方法存在明显的劳动密集和时间成本高的问题,测量精度得不到保证,效率低下。其次,人为的干预会对自然生长环境下的海参造成一定程度的干扰和损害。因此,为了提高海参养殖过程中生长状态观测的效率和精确度,有必要探索和引入更为先进便捷的测量技术。机器视觉的不断发展为农业观测评估任务带来了全新的可能性[4-5]。相比传统的人工测量方法,机器视觉测量具有更高的效率和准确性。通过使用高分辨率的摄像头和先进的图像处理算法,即可实现非接触式的测量,无需人工干预,避免了传统方法中可能存在的测量误差和干扰,从而为农业评估提供了更为可靠和及时的生产数据支持。
国内外学者纷纷进行了机器视觉辅助农业生产的探索[6-9],目前在二维图像方面的研究已经卓有成效。 MIRBOD等[10]开发了一种苹果尺寸测量的机器视觉系统,通过训练两个深度神经网络模型来检测候选苹果的尺寸,然后外推被遮挡的水果区域以改进尺寸估计测量,有效测量苹果的外圈直径。不过由于图像像素和镜头畸变的影响,位于靠近图像边缘水果的直径测量仍存在较大的不准确性。董鹏等[11]利用水下双目标定方法,消除水下光线折射造成的图像失真,并在此基础上,利用凸包与旋转卡壳算法,提出了一种水下海参自动检测与尺寸测量方法,实现了水下环境中的海参长度的测量。但这种依赖于特征点选取的测量方法仍停留在二维图像层面,不仅存在一定的测量误差,更重要的是,无法进行海参体积的测量,而单一的长度信息无法满足养殖户对海参各项生长数据的评估需求。
尽管图像的二维特征可以提供一部分有价值的数据,但生物体本质上是三维的,体积和身体形态等表型信息很难在二维成像的过程中被捕捉到。随着计算机视觉技术的不断发展,三维重建的相关方法越来越多地应用于农业[12-15]。GEN´E-MOLA等[16]提出了一种基于运动结构和多视角立体的点云生成技术,借助点云信息进行果实大小的估算。分别使用基于最小二乘法和估计样本一致性算法将球体模型拟合到苹果的特征点,最后应用模板匹配对苹果点进行三维模型拟合,准确地测量出球体果实的体积信息。虽然该方法能够在一定程度上应对目标物体遮挡的挑战,但在求解特征点以及数据的采集处理方面仍有待进一步研究,以提高方法的效率和实用性。LIAO等[17]开发了一款3DPhenoFish软件,从三维点云数据中提取鱼类形态表型,为区分不同物种样本提供了信息特征。但这样的方法依赖于高精度的工业级点云扫描仪,数据采集时需要将鱼类捕捞并麻醉进行工作,数据获取难度大,且会对生物体造成不可挽回的损伤。因此,需要一种保持海参原位的体积测量方法,在不损害海参的前提下进行高准确率的体积估计。
水下原位海参的体积测量还存在一定的挑战。其一,水下光线多变、环境复杂,如何获取有效精准的三维数据是一个难题;其二,获取的点云数据疏密不齐且存在噪声,对后续的体积计算有很大影响。为此,本文提出一种基于双目视觉[18-19]的体积测量方法,在不惊动海参、得到最真实数据的前提下,保持较高的检测精度和良好的分割效果,且不借助特征点的选取,而是利用三维点云信息,进行海参整体的体积测量。该方法以真实养殖场景下的原位海参作为研究对象,首先借助双目摄像头搭载无人船在海参养殖圈采取完整的数据视频;其次,通过改进的YOLOv8算法对海参进行目标检测,加强水下环境的检测效果;接着,用调整过后的SAM(segment anything model)分割模型进行海参的分割;最后,结合分割掩码和三维信息的映射结果,用泊松重建和体素化的方法进行海参体积的测量。以期满足养殖户的评估需求,为海参的科学养殖提供更为精准的数据支持。
1. 材料与方法
1.1 海参数据集构建
本研究利用双目相机设备,在大连鑫玉龙海参养殖圈内采集海参视频,制作了包含3 192张图片的数据集,囊括了不同季节下海参的各种生长形态。拍摄获取的视频为30帧/s,使用抽帧脚本以30帧抽一次的手段抽取3 192张图像,并使用labelimg标注工具以yolo格式进行标注。数据集未使用离线数据增强,在训练过程中使用在线数据增强,数据集以8∶1∶1的比例随机划分为训练集(2 554张)、测试集(319张)、验证集(319张),从而确保试验数据的真实有效。
1.2 海参体积测量方法总体框架
双目视觉是机器视觉的一种重要形式,它是一种基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。该框架如图1所示,主要包括以下几个步骤:海参目标检测、海参目标分割、海参点云体积测量。首先通过搭载双目相机[20]的水下图像采集设备拍摄海参养殖圈的相关视频,然后采用YOLOv8-MSA(YOLOv8 multi-head self-attention)算法对图像中的海参进行检测,接着采用SAM-AD(SAM adapter)算法借助检测框信息,得到只属于海参的mask掩码信息,利用双目技术获取到的全局点云信息和海参的掩码信息进行映射投影,从而得到只属于海参的点云信息,最后利用泊松重建和体素化处理算法PRV(poisson reconstruction and voxelization)求解海参的体积。
![]() 图 1 海参体积测量总体框架注:YOLOv8-MSA表示YOLOv8 multi-head self-attention模型,用于生成海参检测框;SAM-AD表示segment anything model adapter模型,用于生成海参掩码信息;PRV表示poisson reconstruction and voxelization算法,用于海参体积计算。Figure 1. Overall framework for measuring the volume of sea cucumbersNote: YOLOv8-MSA represents YOLOv8 multi-head self-attention model, which is used for generating sea cucumber detection boxes; SAM-AD represents segment anything model adapter model, responsible for generating sea cucumber mask information; PRV presents poisson reconstruction and voxelization algorithm, which is applied to calculate the volume of sea cucumbers.
图 1 海参体积测量总体框架注:YOLOv8-MSA表示YOLOv8 multi-head self-attention模型,用于生成海参检测框;SAM-AD表示segment anything model adapter模型,用于生成海参掩码信息;PRV表示poisson reconstruction and voxelization算法,用于海参体积计算。Figure 1. Overall framework for measuring the volume of sea cucumbersNote: YOLOv8-MSA represents YOLOv8 multi-head self-attention model, which is used for generating sea cucumber detection boxes; SAM-AD represents segment anything model adapter model, responsible for generating sea cucumber mask information; PRV presents poisson reconstruction and voxelization algorithm, which is applied to calculate the volume of sea cucumbers.1.3 融合多头自注意力的海参检测器的设计
YOLOv8检测模型在速度和精度之间实现了优良的平衡,具备高效的特征提取和轻量化设计,适用于实时检测应用[21-22]。它采用先进的损失函数,提高了检测精度和鲁棒性。结合对于速度和精度两方面的考量,本研究选用YOLOv8s作为本文的基础检测器。但是,水下环境具有其独特性。由于水下的光线条件与陆地上大不相同,水的吸收和散射作用会导致光线减弱,色温出现偏差。YOLOv8s有时难以适应这种光线条件的变化,从而影响检测精度。此外,水下图像往往由于水体颗粒物和运动模糊导致图像质量降低。YOLOv8s的性能在处理这些噪声和模糊时会出现下降,特别是在小目标和复杂背景下。
对此,自注意力机制可以提供良好的解决方案[23-24]。自注意力机制可以动态分配特征图上的权重,模型能够关注到重要的区域和特征,忽略无关的背景噪声。这对于水下环境中复杂背景和噪声干扰显著的情况尤为重要。
多头自注意力机制是一种有效的注意力机制,它通过将输入序列分割成多个头部,并对每个头部的信息进行并行处理,从而提取更丰富的特征表示。多头自注意力机制允许模型在不同的子空间中学习到不同的特征表示。每个注意力头可以关注输入序列中的不同部分或不同的特征维度,从而更好地捕捉输入数据的细节。水下环境通常具有复杂的光照条件、较高的噪声水平以及遮挡等问题。多头自注意力机制能够从多个视角分析和理解水下目标的特征,帮助模型在这些复杂条件下更准确地识别和检测海参。此外,通过多个头的并行计算,多头自注意力机制能够在不同的头之间产生更多样化的表示,使得模型对噪声和输入变化更加鲁棒。最后,多头自注意力机制能够有效地融合来自不同注意力头的多样化信息,这种信息融合有助于提升模型对复杂场景的理解能力。水下目标检测通常需要处理大量的感知信息,包括颜色、形状、纹理等。多头自注意力机制可以有效地整合这些多维度信息,从而更准确地识别和定位目标。综上所述,多头自注意力机制在水下目标检测任务中具有显著的优势。
本研究在主干网络中引入多头自注意力机制[25](multi-head self-attention,MSA),构建了 YOLOv8-MSA 算法模型,模型结构如图2所示。本文在Backbone的最后一层卷积神经网络中引入多头自注意力机制,从而更好地捕捉图像中的细节,增强模型的鲁棒性,提高复杂场景下对目标的识别能力。通过这种注意力机制,模型能够更好地理解图像内容,并从中提取更丰富的特征表示,从而更准确地识别目标。
![]() 图 2 YOLOv8-MSA网络结构示意图注:Conv为卷积操作,C2f为特征提取操作,k表示卷积核的大小,n表示模块内部堆叠的瓶颈块的数量,SPPF为空间金字塔池化结构,Unsample为上采样操作,Concat表示特征融合,Linear为线性变换,Scaled Dot-production attention为缩放点积注意力机制,Detect为检测头。Figure 2. YOLOv8-MSA(multi-head self-attention) network architecture diagramNote: Conv refers to the convolution operation, C2f denotes the feature extraction operation, k represents the size of convolutional kernels, n denotes the number of stacked bottleneck blocks within the module. SPPF represents the spatial pyramid pooling structure, Unsample indicates the upsampling operation, Concat signifies feature fusion, Linear refers to linear transformation, Scaled dot-product attention denotes the scaled dot-product attention mechanism, and Detect refers to the detection head.
图 2 YOLOv8-MSA网络结构示意图注:Conv为卷积操作,C2f为特征提取操作,k表示卷积核的大小,n表示模块内部堆叠的瓶颈块的数量,SPPF为空间金字塔池化结构,Unsample为上采样操作,Concat表示特征融合,Linear为线性变换,Scaled Dot-production attention为缩放点积注意力机制,Detect为检测头。Figure 2. YOLOv8-MSA(multi-head self-attention) network architecture diagramNote: Conv refers to the convolution operation, C2f denotes the feature extraction operation, k represents the size of convolutional kernels, n denotes the number of stacked bottleneck blocks within the module. SPPF represents the spatial pyramid pooling structure, Unsample indicates the upsampling operation, Concat signifies feature fusion, Linear refers to linear transformation, Scaled dot-product attention denotes the scaled dot-product attention mechanism, and Detect refers to the detection head.自注意力机制是Transformer神经网络中的核心组件之一,对输入序列中的元素进行加权表示,以捕捉元素之间的相关性。自注意力机制通过计算元素之间的相似度来找到相关的信息。为此,使用点积注意力机制(dot-product attention)来计算每对元素之间的相似度。对于向量 {\boldsymbol{X}}_{\boldsymbol{i}} 和 {\boldsymbol{X}}_{\boldsymbol{j}} ,它们之间的相似度表示见式(1)。
S\left({\boldsymbol{X}}_{\boldsymbol{i}},{\boldsymbol{X}}_{\boldsymbol{j}}\right)=\frac{{\boldsymbol{X}}_{\boldsymbol{i}}\cdot {\boldsymbol{X}}_{\boldsymbol{j}}}{\sqrt{d}} (1) 式中 S 为 {\boldsymbol{X}}_{\boldsymbol{i}} 和 {\boldsymbol{X}}_{\boldsymbol{j}} 的相似度, d 为向量的维数, {\boldsymbol{X}}_{\boldsymbol{i}}\cdot {\boldsymbol{X}}_{\boldsymbol{j}} 为向量 {\boldsymbol{X}}_{\boldsymbol{i}} 和 {\boldsymbol{X}}_{\boldsymbol{j}} 的点积。
接下来,将相似度转换为权重 ,以便在计算上下文表示时使用。为此,需要对相似度进行归一化,使它们加起来为1。具体来说,使用Softmax函数将相似度作为指数,以得到每个元素的权重。对于向量 {\boldsymbol{X}}_{\boldsymbol{i}} 和 {\boldsymbol{X}}_{\boldsymbol{j}} ,它们之间的权重见式(2)。
W\left({\boldsymbol{X}}_{\boldsymbol{i}},{\boldsymbol{X}}_{\boldsymbol{j}}\right)=\frac{\mathrm{exp}\left(S\left({\boldsymbol{X}}_{\boldsymbol{i}},{\boldsymbol{X}}_{\boldsymbol{j}}\right)\right)}{\displaystyle\sum\nolimits_{1}^{n}\left(S\left({\boldsymbol{X}}_{\boldsymbol{i}},{\boldsymbol{X}}_{\boldsymbol{j}}\right)\right)} (2) 式中 n 为输入序列的长度, W\left({\boldsymbol{X}}_{\boldsymbol{i}},{\boldsymbol{X}}_{\boldsymbol{j}}\right) 为第 i 个向量对于第 j 个向量的权重。此时,对于每个向量 {X}_{i} ,都得到了一个权重向量,最后使用权重向量 W\left({\boldsymbol{X}}_{\boldsymbol{i}}\right) 来计算每个向量的上下文表示(结合了全局信息之后新的特征表示)。
多头注意力机制允许网络在不同的空间位置或特征表示中同时执行多个不同的SA(self-attention)。在传统的SA中,神经网络通过对输入进行加权平均来获取注意力加权和,但是这种方法仅仅考虑了一种特征表示,而忽略了其他可能与当前任务相关的特征。为了解决这个问题,多头注意力机制引入了多个并行的注意力机制,从不同的角度观察输入数据,然后将它们的结果合并起来。输入数据会通过多个线性变换,将变换的结果分成多个头部,每个头部独立地计算注意力权重,并使用它们来对输入进行加权求和,具体表示见式(3)
{M}_{h}\left(Q,K,V\right)=\mathrm{Concat}\left({h}_{1},{h}_{2},{h}_{3}\cdots \cdots {h}_{h}\right){W}_{0} (3) 式中 Q 、 K 和 V 为输入的查询、键和值, h 为头部的数量, {W}_{0} 为一个线性变换, \mathrm{C}\mathrm{o}\mathrm{n}\mathrm{c}\mathrm{a}\mathrm{t} 将多个头部连接起来。以此实现关注不同的特征表示,从而提高模型的泛化能力和表现能力。
海参目标检测器训练时,图片大小为640像素×640像素,初始学习率为0.01,动量为0.937,权重衰减为0.000 5,批量大小为32,训练回合数为150,每次训练回合都进行1次测试回合。训练所采用的操作系统为Windows11,深度学习框架为PyTorch,训练的处理器为16核i7-13700KF,显卡为NVIDIA GeForce RTX 2080 ti。
图3展示了改进后的海参检测器在训练过程中的损失函数和测试指标的变化趋势。由图3a和3b可见,无论是在训练集还是验证集中,分类损失(cls_loss)都在稳定下降,并在训练后期趋近于零,验证集的损失曲线也与训练集保持一致。此外,测试指标见图3c和3d,可以看出精度和mAP随着训练轮次的增加,在25轮左右快速达到较高水平,均达到0.9左右。随后,这些指标继续随着训练轮次的增加而稳步提升,并最终收敛。这表明模型在训练过程中不存在验证集损失与训练集损失显著偏离的情况,即未出现明显的过拟合现象。
![]() 图 3 训练过程中的损失函数和测试矩阵注:图3a和3b的纵坐标为分类损失的数值化表示,用来衡量模型预测与实际标签之间的差距。Figure 3. Loss function and test matrix in training processNote:The vertical axis in figure 3a and 3b represents the numerical value of the loss, which is used to measure the difference between the model's predictions and the actual labels.
图 3 训练过程中的损失函数和测试矩阵注:图3a和3b的纵坐标为分类损失的数值化表示,用来衡量模型预测与实际标签之间的差距。Figure 3. Loss function and test matrix in training processNote:The vertical axis in figure 3a and 3b represents the numerical value of the loss, which is used to measure the difference between the model's predictions and the actual labels.可见,改进后的海参检测器不仅在训练过程中表现出色,而且在测试阶段也具有较高的稳定性和精度。模型能够在较短的训练时间内迅速达到较高的检测性能,具有良好的稳定性和泛化能力,证明了其在水下应用场景中的有效性。
1.4 融合adapter机制的海参分割模型的改进
分割的目的是从左视图中分割出海参,并给出其在图像平面上的掩码信息,本研究选用SAM[26-29]作为图像分割模型。SAM具备高度通用性和灵活性,能够处理不同类型的分割任务,它可以在不需要额外训练的情况下对不熟悉的对象和图像进行零样本泛化,从而“剪切”任何图像中的任何对象。SAM利用卷积神经网络对图像进行特征提取,并利用轻量级编码器将任何提示转换为嵌入向量,然后在轻量级解码器中组合这两个信息源,预测分割掩码。然而,在实际养殖环境下,海参常常具有与周围环境高度相似的颜色和纹理,使得难以准确区分和分割。由于海参的伪装特性,SAM在分割任务中容易受到干扰,导致分割精度下降,限制了模型在水下任务中的有效性。
为了提升SAM在水下场景中的分割性能,增强其在下游任务中的表现能力,本研究在SAM模型中引入adapter机制,提出SAM-AD模型。调整后的模型框架如图4所示。adaptor机制是一种轻量级的模块,可以插入到预训练模型的中间层中,实现对新任务或新领域的快速适应。
![]() 图 4 SAM adapter模型结构图注:Patch Embedding为图像嵌入;Transformer Layer为转换层,用于捕捉图像全局依赖关系和上下文信息;MLP为多层感知机;decoder为解码器。Figure 4. SAM(segment anything model) adapter model architecture diagramNote:Patch Embedding refers to image embedding; Transformer Layer refers to the transformation layer, which is used to capture the global dependencies and contextual information of the image; MLP represents multilayer perceptron; decoder refers to the decoding unit.
图 4 SAM adapter模型结构图注:Patch Embedding为图像嵌入;Transformer Layer为转换层,用于捕捉图像全局依赖关系和上下文信息;MLP为多层感知机;decoder为解码器。Figure 4. SAM(segment anything model) adapter model architecture diagramNote:Patch Embedding refers to image embedding; Transformer Layer refers to the transformation layer, which is used to capture the global dependencies and contextual information of the image; MLP represents multilayer perceptron; decoder refers to the decoding unit.具体而言,所有适配器的架构是较为统一的:一个低阶全连接层DOWN,一个RELU激活函数和一个高阶全连接层UP,它可以保留预训练模型的参数不变,只需训练少量的参数即可达到良好的效果,同时减少了计算资源和存储空间的需求。每个Transformer块由两个子块组成,分别是多头自注意力层和MLP层。每块的自注意力层会搭配一个adapter适配器,在第二个MLP子块之前进行残差连接。在第二个MLP层中,另一个全新的适配器会与原始的MLP层并行,从而生成当前块的输出特征。使用更多样化和高质量的水下图像来预训练SAM模型,借此增强其在水下图像中的泛化能力和准确性,使其能够适应水下环境的复杂性和多样性。
此外,针对水下任务的特殊环境,该模型选用了YOLOv8的识别框作为提示方式来指导SAM进行分割。改进后的YOLOv8在水下图像中能够快速且准确地定位出物体的位置和大小,从而为SAM-AD提供了有效的先验信息。将YOLOv8检测到的海洋珍品的边界框作为输入,传递给SAM模型。SAM模型将其作为一个提示,根据边界框的位置和大小,生成属于目标物体的分割掩码,从而实现海洋珍品的分割。这样的补充操作有效减少了分割过程中的误差和噪声,提高了分割的精度和效率。
1.5 基于泊松重建和体素化处理的点云体积计算方法
将mask掩码映射到由双目信息构建的全局点云,据此即可得到只属于目标物体的点云信息[30-32]。但这样的海参点云数据存在一个问题。经过分割后获得的海参点云并不是完全闭合的。环境的复杂以及相机的精度都可能带来一部分的点云噪声。此外,点云模型的下部呈镂空状,有大部分的数据缺失。同时,体积计算时还可能涉及高度值的确定,这都会对体积计算带来影响。因此,在进行体积计算之前,首先需要对点云数据进行表面重建以达到封闭图形的效果。
传统的表面重建方法各有优劣。Alpha shapes[33]算法是一种非常灵活的表面重建方法,通过调整参数α进而控制重建结果的细节水平,但会产生过度光滑或不完整的表面,也容易出现拓扑错误,从而出现不连通的表面或孔洞;Ball pivoting[34]法通过模拟球在点云表面滚动,逐步连接点云形成表面模型来计算体积,尽管该方法在处理点云数据方面具有一定的优势,但当点云数据中存在较多的噪声点时,滚动球容易受到干扰,生成不准确的表面模型,从而影响体积计算结果,产生较大的波动偏差;泊松重建[35]法通过对点云数据进行密集采样并利用法线信息推断表面连续性,生成连续且无漏洞的网格模型。综上所述,本文提出了一种基于泊松重建和体素化处理的PRV点云体积计算方法,总体流程如图5所示。
![]() 图 5 PRV算法体积计算流程图Figure 5. PRV (poisson reconstruction and voxelization) algorithm volume calculation flowchart
图 5 PRV算法体积计算流程图Figure 5. PRV (poisson reconstruction and voxelization) algorithm volume calculation flowchart首先,将物体点云数据利用八叉树划分空间区域,将每个点放到正方形的空间里,设定某一阈值,如果该正方形内的数据点超过这个阈值,就将该正方体再次划分,直到每个小正方体包含的点数小于或等于这个阙值,每个小正方体就是一个叶节点,深度为D,调整D的参数大小即可改变重建的精密程度。其次,泊松重建的过程很大程度上依赖于法线向量的确定。因此,需要估计每个点的法线向量,以便了解表面的方向信息。法线向量是垂直于表面的向量,可以指示表面的朝向和曲率。本文采用了基于最近邻搜索的方法来估计每个点的法线向量。具体而言,使用KD树(K-dimension tree)搜索方法,通过搜索每个点周围的最近邻点来估计法线的方向。基此,通过隐式地拟合一个由物体派生的指示函数,可以给出一个平滑的物体表面的估计。给定一个区域 S 及其边界 {{\partial}}S ,指示函数 {X}_{s} 定义见式(4)。
{X}_{s}=\left\{\begin{array}{c}1 ,x\in S\\ 0 ,x\notin S\end{array}\right. (4) 这个指示函数定义模型内部的值大于0,外部的值小于0,而为0的部分即为等值面 \partial S ,提取出来就是几何目标模型的表面。
指示函数作为一个分段函数,不具有连续性,因此需要用滤波器来平滑卷积指示函数,然后再求解平滑函数的梯度场。根据高斯散度理论,平滑指示函数的梯度等于平滑表面法向场得到的向量场。对于任意点p∈ \partial S ,定义 {\overrightarrow{\boldsymbol{N}}}_{\partial \boldsymbol{S}}\left(\boldsymbol{p}\right) 表示向内的表面法向量,q为表面的任意一点, F\left(q\right) 为是一个平滑滤波器, {F}_{p}\left(q\right)=F(q-p) 是F沿p方向的平移。 {X}_{s} 一般意义上是不好求导的,这里用 {X}_{S}\times F 的导数来近似,记作\tilde{F} ,具体见式(5)
\nabla \left({X}_{S}\times \tilde{F}\right)\left(q\right)={\int }_{\partial S}{\tilde{F}}_{p}\left(q\right){\overrightarrow{\boldsymbol{N}}}_{\partial \boldsymbol{S}}\left(\boldsymbol{p}\right){\mathrm{d}}p (5) 式中\nabla 为散度算子;×是卷积符号,这里通过卷积实现平滑操作。 \tilde F 表示平滑函数,q点为表面的任意一点,用于确定平滑处理的方向,\tilde F_p 表示p点邻域内的平滑处理,\tilde F_p (q) 表示沿方向的平移。
由于物体表面点云数据是离散的, {\overrightarrow{\boldsymbol{N}}}_{\partial \boldsymbol{S}}\left(\boldsymbol{p}\right) 对于表面每个点 q 的分布是未知的,这就需要通过观测 p=\left({p}_{i},{n}_{i}\right) 来近似。将初始离散样本点集记为 \mathrm{T} , t 为 \mathrm{T} 中的一个点(t ∈ T ) ,t包含位置信息( t.p )和法向量信息( t.\overrightarrow{N} )。将 \partial S 按照空间划分成不同的表面区域 \partial T ,即 t\in\mathrm{T} , \partial T\subset \partial S 。将上式转化成积分求和,其中每个小的积分可以近似为常函数,可以用( t.p )对应的函数和 \partial T 的面积的积分代替,见式(6)。
\begin{split} \nabla \left({X}_{S}\times \stackrel{~}{F}\right)\left(q\right)\;& =\sum _{t\in T}{\int }_{\partial T}{\stackrel{~}{F}}_{p}\left(q\right){\overrightarrow{\boldsymbol{N}}}_{\partial \boldsymbol{S}}\left(\boldsymbol{p}\right){\mathrm{d}}p \\ & \approx \sum _{t\in T}\left|\partial T\right|\stackrel{~}{F}\left(q-t.p\right)t.\overrightarrow{\boldsymbol{N}}=\overrightarrow{\boldsymbol{V}}\left(\boldsymbol{q}\right) \end{split} (6) 式中\overrightarrow{\boldsymbol{V}}\left(\boldsymbol{q}\right) 表示划分表面后点云的向量空间。
这样,由梯度关系得到采样点和指示函数的积分关系,根据积分关系利用划分块的方法获得点集的向量场,计算指示函数梯度场的逼近,从而构成泊松方程。向量空间 \overrightarrow{\boldsymbol{V}} 和 {X}_{S} 满足式(7)。
\nabla \overrightarrow{\boldsymbol{X}}=\overrightarrow{\boldsymbol{V}} (7) 式中 \overrightarrow{\boldsymbol{V}} 表示整体点云的向量空间。 \overrightarrow{\boldsymbol{X}} 表示平滑后的指示函数。
将两边同时求导,得到式(8)。
\Delta \overrightarrow{X}=\nabla \cdot \nabla \overrightarrow{\boldsymbol{X}}=\nabla \cdot \overrightarrow{\boldsymbol{V}} (8) 式中 \mathrm{\Delta } 为拉普拉斯算子,方程的解可以用拉普拉斯方程基本解与函数卷积求出,得到指示函数。
然后,根据泊松方程使用矩阵迭代求出近似解,采用移动立方体算法提取等值面,对所测数据点集重构出被测物体的模型,泊松方程在边界处的误差为零,因此得到的模型不存在假的表面框。
最后,一旦获得了连续的三角形网格,就可以将其转换为体素表示。体素化是将连续的几何表面离散化为规则网格的过程。在本研究中,使用体素化的方法,将连续的三角网格转换为规则的立方体网格。体素化过程中,通过指定体素的大小,即体素边长,以决定体素的密度和最终体积估算的精度。通过统计体素网格中的非零元素数量即可估算网格的体积。每个非零元素代表了体素网格中的一个小体积单元,对应于原始网格中的一部分。因此,通过计算非零元素的数量并乘以体素的体积,可以得到对原始网格体积的估算。
2. 结果与分析
2.1 海参体积测量方法可行性验证
为了验证本文所提出的方法的可行性,在实际测量过程中,本研究使用高分辨率的双目摄像头拍摄海参,从不同角度获取两张图像,通过图像处理技术提取海参的三维点云数据。随后,程序对点云数据进行处理,计算得到海参的体积。图6为海参体积测量程序的实例展示。
2.2 海参体积测量方法有效性验证
2.2.1 检测模型对比试验
为了验证YOLOv8-MSA模型的有效性,本研究进行了检测精度的对比试验。所有试验均在配备NVIDIA RTX
2080 ti GPU的计算机上进行,系统为Windows 11,使用的深度学习框架为PyTorch1.8.1,CUDA版本为11.7。试验使用自制的水下原位海参图像的数据集,对比了Faster RCNN、Cascade RCNN、YOLOv7、YOLOv8s和YOLOv8-MSA5种模型的检测性能。试验数据具体如表1,结果表明,Faster RCNN和Cascade RCNN作为目前表现很好的两阶段目标检测算法,在检测精度方面表现突出,mAP@0.5分别达到了88.9%和89.4%,显著高于YOLOv7约10个百分点。然而,这两种模型的参数量和FLOPs都较为庞大,尤其是Cascade RCNN,其参数量达到69.4 M,FLOPs为256.3 G,大大降低了检测速度。这说明,尽管Faster RCNN和Cascade RCNN在精度上占优,但它们不具备足够的效率。相比之下,YOLOv8s在大幅减少参数量和计算量的同时,依然保持了较高的精度。本文方法在其基础上融合了MSA模块之后,其mAP@0.5达到了92.5%,相较于原始YOLOv8s提高了1.3个百分点,同时参数量和FLOPs仅有11.4 M和28.9 G。这表明,YOLOv8-MSA检测模型在水下海参的检测方面具有一定的优势。此外,YOLOv7的R指标为0.641,显著低于其他模型。这表明,尽管YOLOv7在P指标上表现良好,但在召回率方面存在不足,水中的复杂环境导致部分目标未被检测到。与此相比,YOLOv8s和YOLOv8-MSA在保持高精确率的同时,R指标也较高,分别为0.873和0.885,使得它们的F1得分显著高于其他检测模型。可见,YOLOv8-MSA引入MSA模块,有效提升了模型的整体检测性能,展现了综合性能的最佳表现。
表 1 检测模型性能对比分析Table 1. Performance comparison and analysis of detection models模型
ModelsmAP@
0.5/%FPS/
(帧·s−1)P/% R/% F1评分
F1 score/%Flops/G 参数量
Params/MFaster RCNN 88.9 11 0.769 0.901 0.829 208.1 40.7 Cascade RCNN 89.4 13 0.789 0.914 0.847 256.3 69.4 YOLOv7 78.2 24 0.910 0.641 0.752 104.7 37.2 YOLOv8s 91.2 33 0.937 0.873 0.904 28.5 11.3 YOLOv8-MSA 92.5 31 0.963 0.885 0.922 28.9 11.4 注:mAP@0.5为交并比为0.5时的平均精度均值,FPS为帧率,P为精确率,R为召回率,Flops为浮点计算量。 Note:mAP@0.5 is the mean average precision when the IoU threshold is 0.5, FPS stands for frames per second, P is precision, R is recall, Flops is floating point operations per second. 2.2.2 表面重建效果对比试验
为了验证表面重建算法的有效性,本研究进行了3种表面重建算法的效果对比试验。试验随机选取了一帧包含海参的图像并获取其点云数据,分别运用Alpha shapes、Ball pivoting以及泊松重建3种不同的表面重建算法对海参进行表面重建。图7为3种不同方法的海参表面重建效果图。可见,Alpha shapes表面重建的效果不如人意,海参的形态特征没有得到较好的体现,并且还存在较大的空洞区域;Ball pivoting重建的效果有所提高,但仍然存在许多零碎的空洞区域;泊松重建的效果最佳,不仅能体现出海参的模型表征,且重建后的表面具有连续性,贴合海参的真实形态。这给后续的体素化处理以及体积测量提供了更有利的数据支持。
2.2.3 体积测量算法对比试验
为了验证体积测量的有效性和准确性,本研究进行了体积准确度测量的相关试验。排水法是传统的体积测量方法之一,具有较高的精度和可靠性。本试验选取了大小不一的10个海参模型,使用排水法分别测量其实际体积,随后,利用本文提出的体积测量算法,在100 cm的深度下,对相同的海参进行测量。计算结果如表2所示。
表 2 不同方法下海参体积测量准确率比较Table 2. Comparison of accuracy in sea cucumber volume measurement using different methods算法Algorithm 体积Volume/cm3 平均准确率
Average accuracy/%1 2 3 4 5 6 7 8 9 10 实际体积 193 213 175 226 290 358 223 272 146 213 最小包围框法 253 300 236 332 446 465 323 373 180 296 72 Alpha shapes 112 136 124 383 136 240 134 446 73 292 62 Ball pivoting 164 172 154 167 367 393 187 185 113 168 80 PRV(本研究) 176 198 177 199 278 365 207 256 143 194 94 将实际体积和PRV算法测量的体积结果进行比较,发现程序测量体积的平均准确率在94%左右。这一结果表明,基于双目视觉的体积测量程序具有较高的准确性和可靠性,操作简便,测量速度快,能够有效替代传统的排水法进行海参体积测量,适合大规模养殖场景中的快速检测需求。
此外,采用不同的测量算法对海参的点云模型进行了体积测量,分别使用PRV算法、最小包围框测量法、Alpha shapes法和Ball pivoting法4种不同的方法进行对比分析,以确定最适合的测量方法。以第一组数据为例,最小包围框法通过构建一个最小的长方体将整个点云模型包围起来,以此计算体积。然而,由于包围框包含了海参之外的部分空间,这导致体积估算的上限较高,计算得到的体积普遍偏大(253 cm3),无法精确反映海参的真实体积。尤其对于形态不规则的海参,包围框的体积会明显大于实际体积,导致测量结果不准确。Alpha shapes法构建了过于光滑的表面,且出现了一部分空洞,对重建的效果和体积的测量也存在较大影响。Ball pivoting法在实际测量中由于点云数据的离散性和噪声,导致体积测量误差较大,稳定性较差。泊松重建法通过对点云数据进行密集采样并利用法线信息推断表面连续性,生成连续且无漏洞的网格模型。该方法能够较好地贴合海参的真实形态,提供更为准确的体积测量结果(176 cm3),与实际体积(193 cm3)最为接近。
为了验证本文算法在不同的检测距离下的可靠性,本研究进行了不同深度下的测量精度对比。试验设定在70、100、120、150 cm 4个不同距离下,分别运用上述4种方法进行了海参体积测量准确率的计算。试验结果如表3所示。
表 3 不同深度海参体积测量准确率比较Table 3. Comparison of accuracy in sea cucumber volume measurement at different depths深度Depth/cm 准确率Accuracy/% 最小包围框法 Alpha shapes Ball pivoting PRV(本研究) 70 74 46 75 91 100 46 62 80 94 120 75 68 82 88 150 91 53 77 83 可见,无论在哪一个深度情况下,PRV算法测量的准确率均优于其他3种方法。结合双目相机的最佳工作距离,在距离为100 cm左右时达到最高的体积测量精度94%,相比最小包围框法、Alpha shapes、Ball pivoting方法分别提高了22、32、14个百分点。上述试验结果表明,泊松重建法的体积测量结果偏差在可控范围内,具有更高的精度和稳定性。
3. 结 论
本文提出了一种基于双目视觉和点云处理的海参体积计算方法,通过双目相机获取到目标物体的全局信息,然后利用二维信息进行检测和分割,接着通过二维和三维的映射关系,得到海参的三维点云数据,并通过表面重建算法对数据进行过滤和优化,最后求解海参的体积。
1)本文在YOLOv8的基础上,加入多头自注意力机制,构建YOLOv8-MSA(YOLOv8 multi-head self-attention)检测模型,平均精度均值达到了92.5%,相较于原始模型提高了1.3个百分点。此外,运用融合adapter机制的SAM-AD(segment anything model adapter)分割模型进行海参的目标分割,为海参的体积测量提供精准可靠的掩码数据。
2)本文构建融合泊松重建和体素化处理的PRV(poisson reconstruction and voxelization)算法进行海参体积的测量。试验表明,该方法在深度为100 cm时,测量精度达到94%,比表现较好的Ball pivoting方法高出14个百分点,具有较高的精确性,能够在实际的生产养殖过程中提供较大的帮助。
本研究采用的方法并不依赖于特征点的选取和目标物体模型的构建,而是借助双目相机的视差分析结合图像像素级别的处理,完成整体的体积测量。该方法不仅能有效测量海参的体积,加以改进,迁移到扇贝、海胆等海洋珍品的数据测量任务上也会有不错的表现。整体的体积测量算法具有较强的鲁棒性和迁移性。
本研究采用的分割模型为SAM,作为一款分割大模型,由于其庞大的参数量和复杂的计算过程,对计算资源的需求较高,难以满足高实时性要求的任务,导致算法整体的运行速率欠佳。此外,泊松表面重建的方法也存在对边界处理能力差、精度有限的问题,有待改进。接下来的研究中,将致力于优化分割任务,在实现高精度的同时提升运算效率。同时,优化表面重建的效果,提高体积测量算法在各个不同深度水域中的鲁棒性,使其更加智能化、通用化,能够适应各种不同的水下环境。
-
![]()
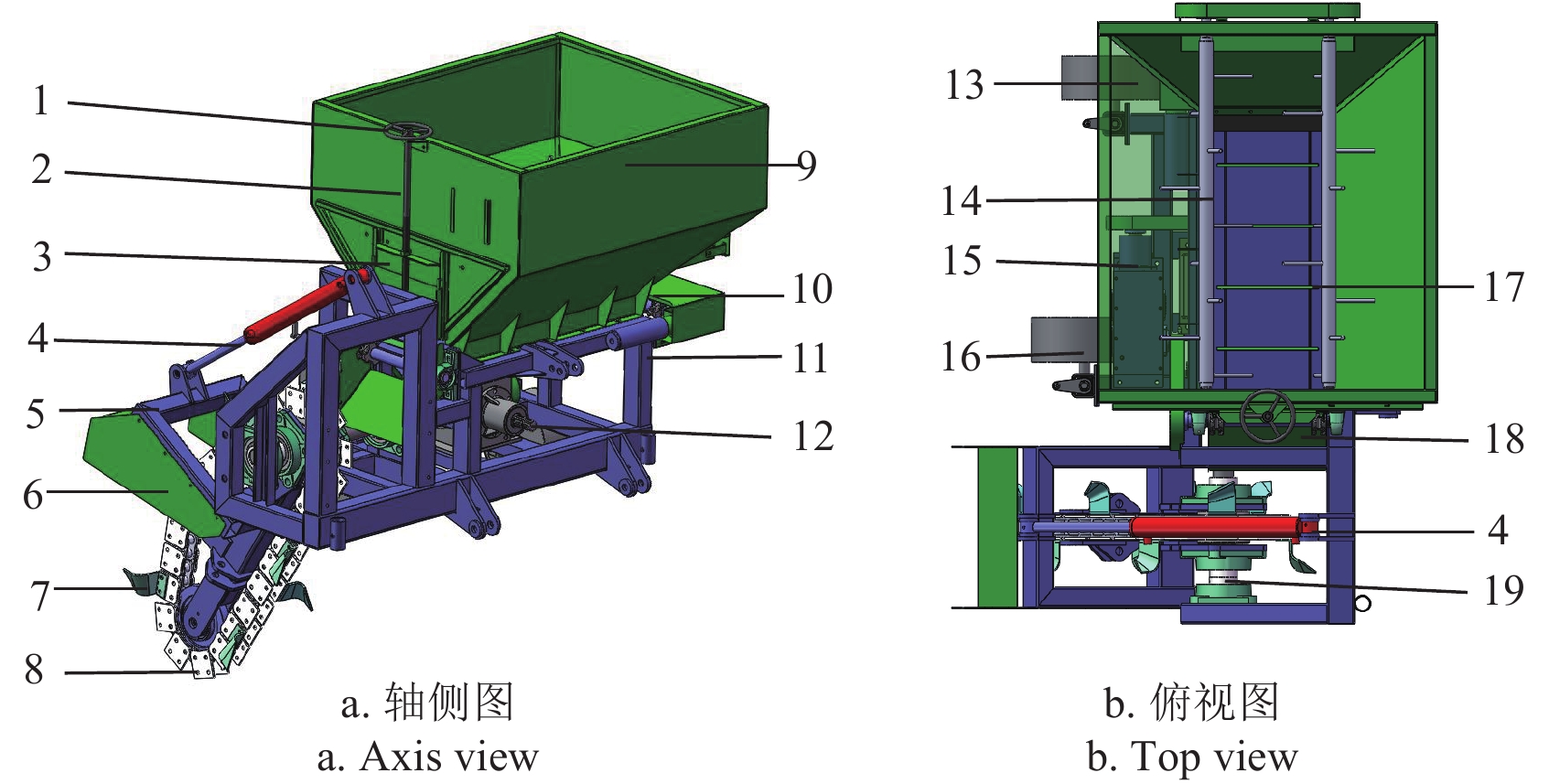
图 1 链式反转开沟施肥机结构图
1.手轮 2.滚珠丝杆 3.阀门 4.调节油缸 5.旋转梁 6. 挡土罩壳7.开沟刀 8.板式链条 9.肥箱 10.后罩壳 11.机架 12.中间变速箱 13.左支撑轮 14.搅拌轴 15.减速箱 16.右支撑轮 17.刮板 18.出肥口 19.开沟驱动轴
Figure 1. Structure diagram of chain reversal trenching and fertilization device
1.Handwheel 2. Ball screw 3. Valve 4. Regulating oil cylinder 5. Rotating beam 6. Soil guard housing 7. Trenching blade 8. Plate chain 9. Fertilizer box 10. Rear housing 11. Frame 12. Intermediate gearbox 13. Left support wheel 14. Mixing shaft 15. Reduction gearbox 16. Right support wheel 17. Scraper 18. Fertilizer outlet 19. Trench drive shaft
![]()
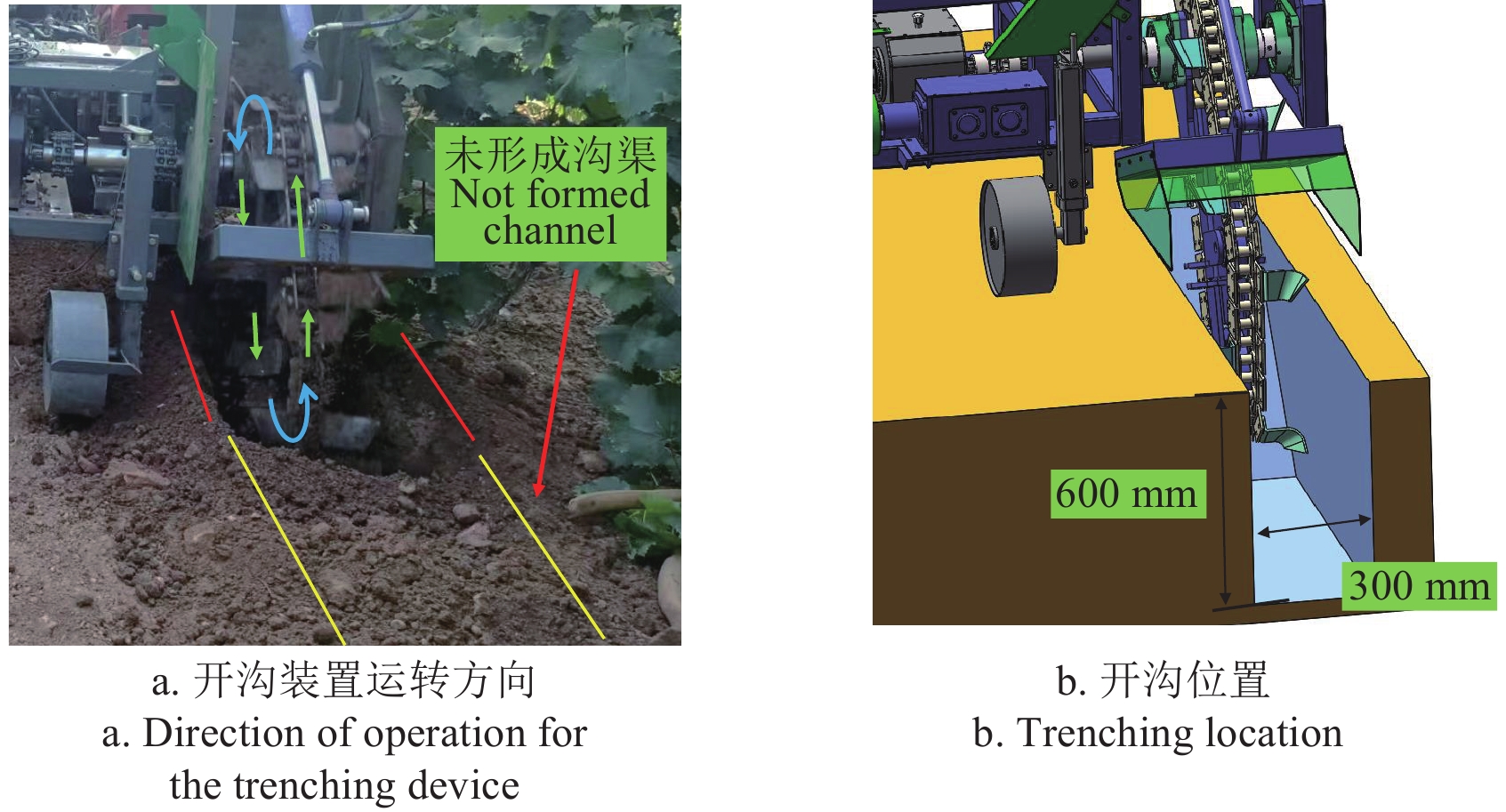
图 2 开沟装置运转方向及开沟位置
Figure 2. Operational direction and trenching position of the trenching device
![]()
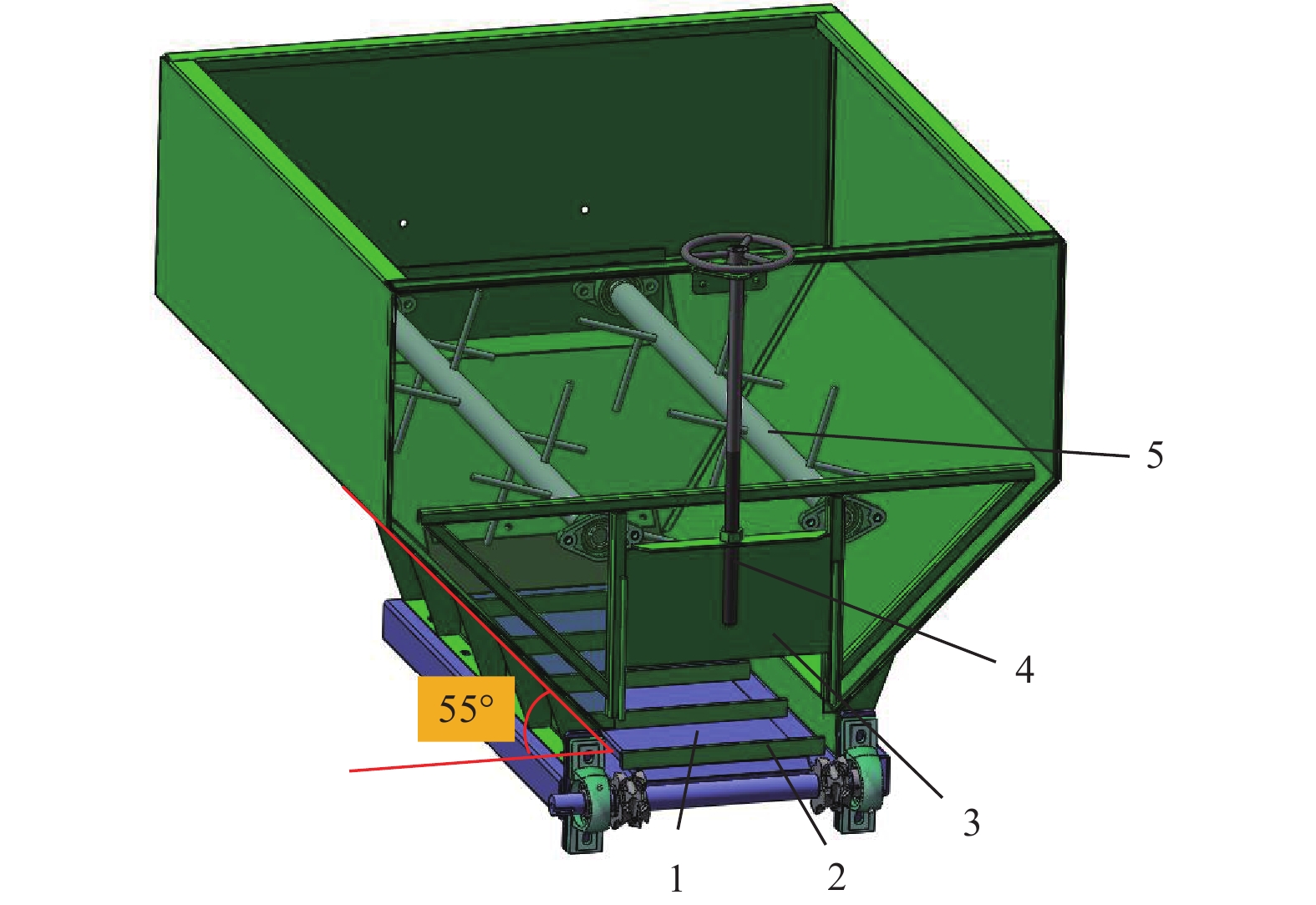
图 3 排肥装置结构示意图
1.支撑板2.刮板3.阀门4.手轮5.搅肥总成
Figure 3. Structure schematic of fertilizer distribution device
1.Support plate 2.Scraper 3.Valve 4.Handwheel 5.Fertilizer mixing assembly
![]()
图 4 两种排肥模式
注:v为前进速度,km·h-1;v1为刮板运动速度,km·h-1。
Figure 4. Two fertilization modes
Note: v represents forward speed, km·h-1; v1 represents scraper movement speed, km·h-1.
![]()
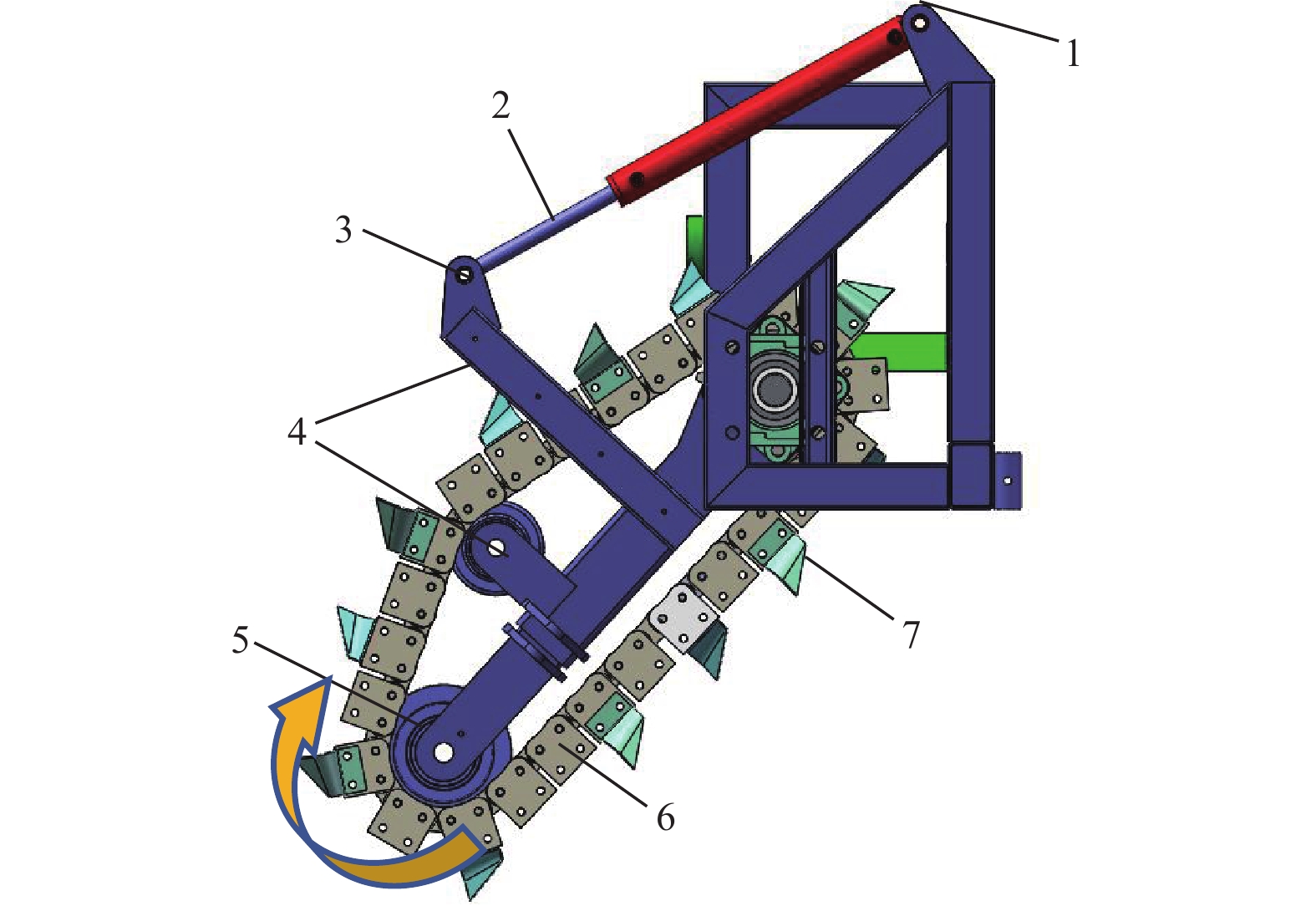
图 5 开沟装置示意图
1.油缸上支点2.液压油缸3. 油缸下支点4.支撑梁5.尾轮6.板式链条7.开沟刀
Figure 5. Diagram of trenching device
1. Point on top of oil cylinder 2. Hydraulic oil cylinder 3. Point on bottom of oil cylinder 4. Support beam 5. Tail wheel 6. Plate chain 7. Trenching blade
![]()
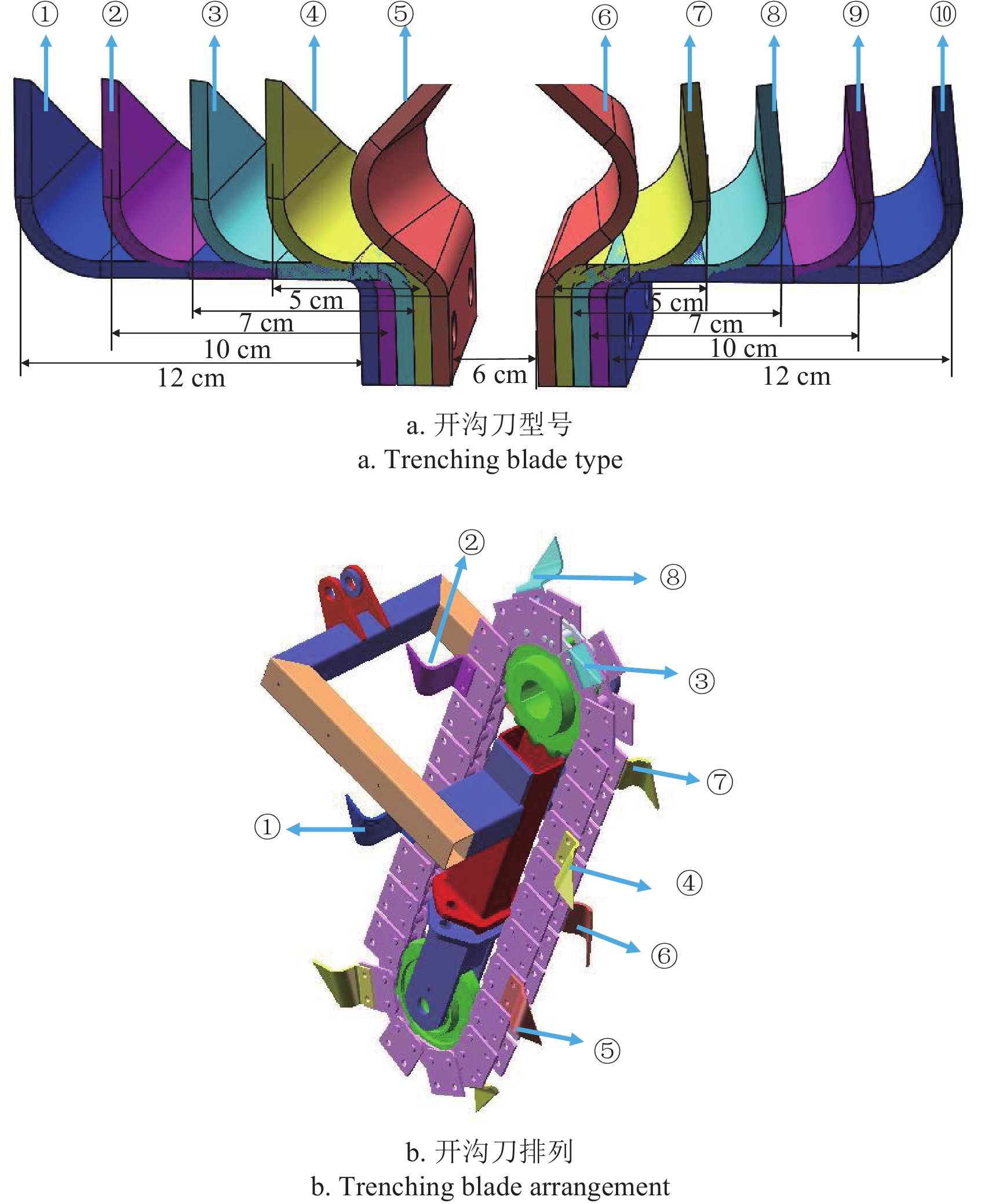
图 6 开沟刀型号与排列
注:①~⑤为左刀,⑥~⑩为右刀;其中①和⑩、②和⑨、③和⑧、④和⑦ 、⑤和⑥分别表示开沟宽度为30、25、20、15和12 cm的开沟刀。
Figure 6. Type and arrangement of trenching blades
Note: ①~⑤ represent the left blades, ⑥~⑩ represent the right blades; where blades ① and ⑩ 、② and ⑨ 、③ and ⑧ 、④ and⑦ 、⑤ and ⑥ denote blades with trenching widths of 30, 25, 20, 15 and 12 cm, respectively.
![]()
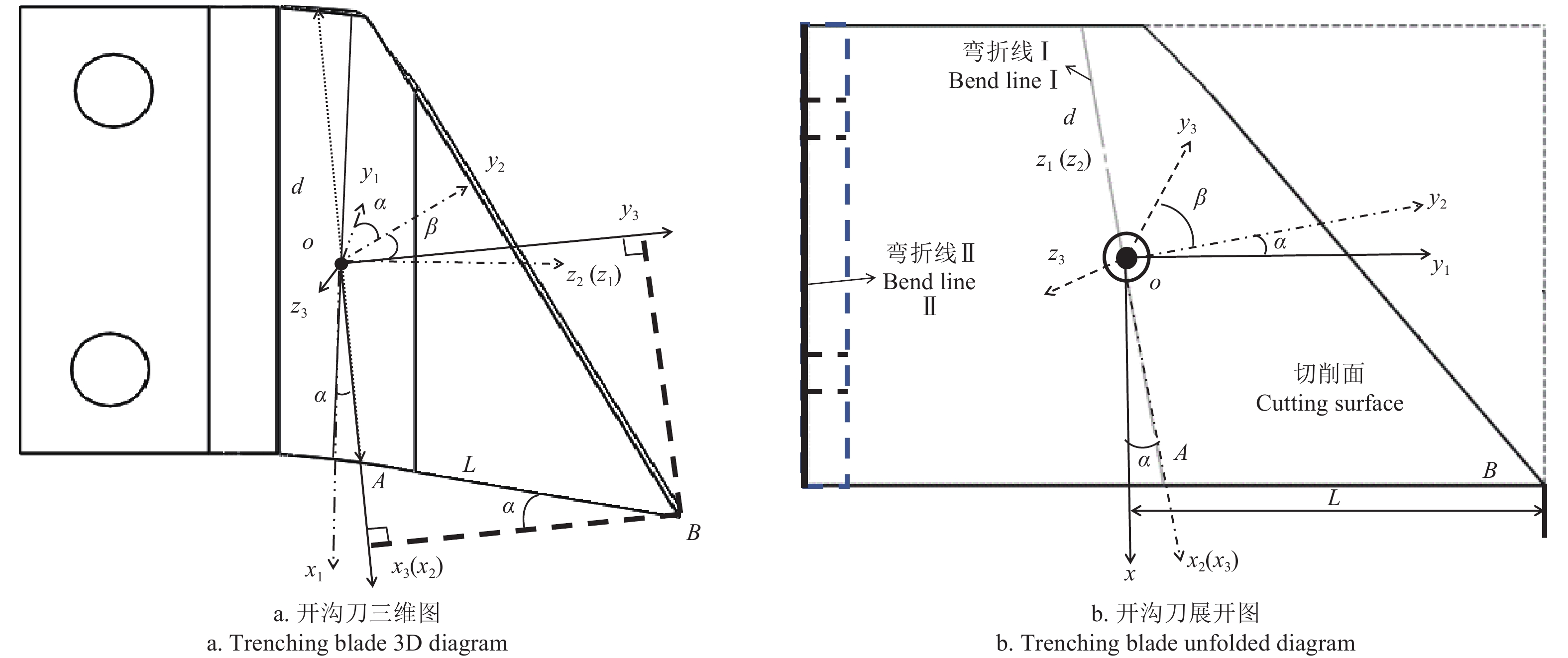
图 7 开沟刀坐标系示意图
注:A、B为刀刃端点,o为坐标原点;d为折弯线Ⅰ的长度,mm;L为A、B点间距离,mm;α为弯折线Ⅰ的倾角,(°);β为切削面的弯折角度,(°)。
Figure 7. Diagram of trenching blade coordinate
Note: A and B represent the two endpoints of the cutting edge, o represents coordinate origin; d represents the length of bend line I, mm; L represents the distance between A and B points, mm; α represents the inclination angle of bend line I, (°); β represents the bending angle of the cutting surface, (°).
![]()
图 8 开沟刀倾斜角度示意图
注: A' 、 B' 为 A 、 B 两点在水平面的投影。
Figure 8. Trenching blade tilt angle schematic diagram
Note: A' and B' are the projections of points A and B onto the horizontal plane.
![]()
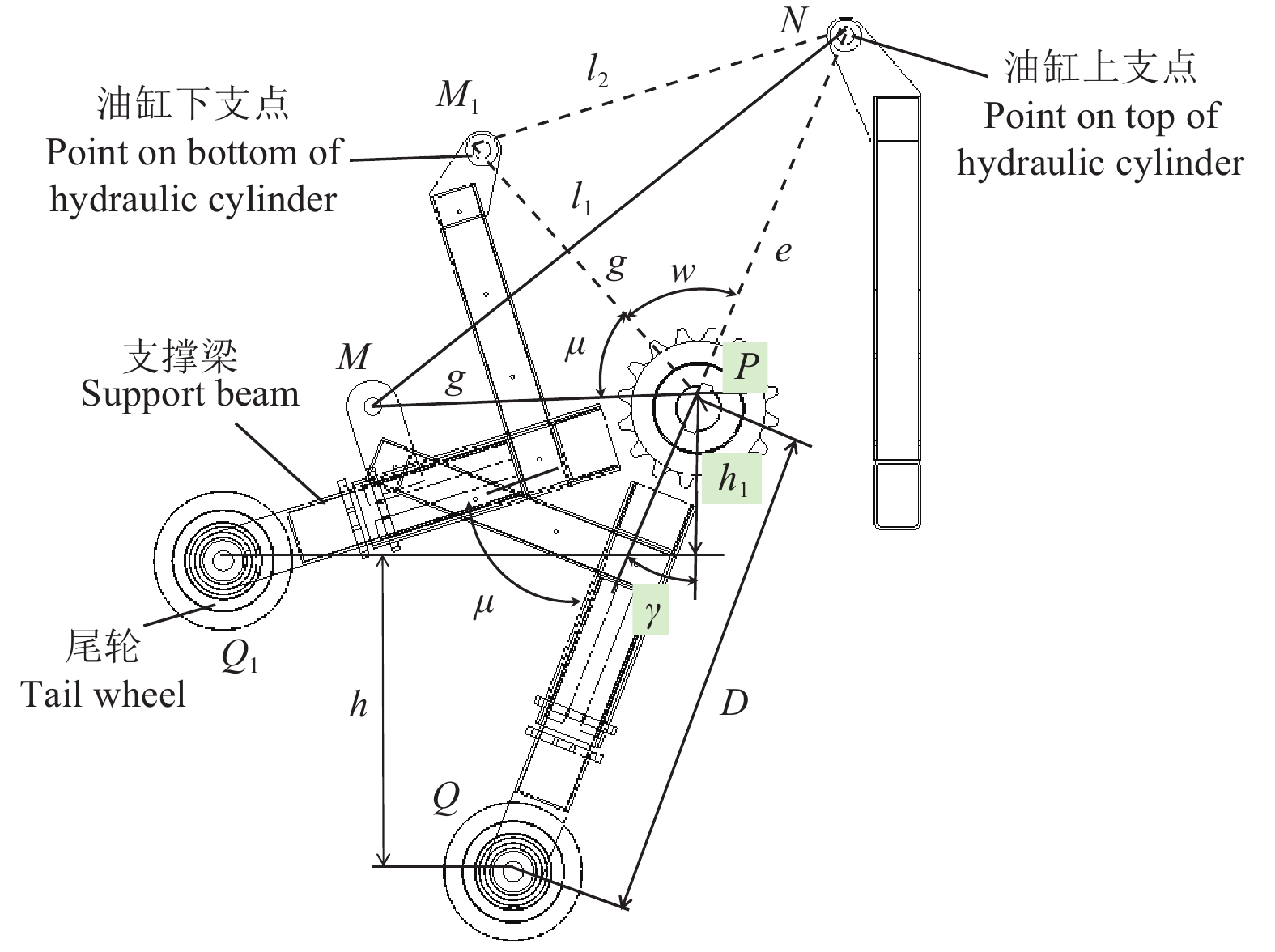
图 9 开沟装置运动示意图
注:P为旋转中心;h为最大作业深度,mm;g为油缸下支点到旋转中心的距离,mm;e为油缸上支点到旋转中心的距离,mm;D为支撑梁的长度,mm;h1为开沟装置恰好抬离地面时,尾轮中心到旋转中心的垂直距离,mm;l1为液压缸完全伸出时的长度,mm;l2为液压缸完全缩回时的长度,mm; μ为开沟装置从最大作业深度恰好旋转至抬离地表面的角度,(°);w为开沟装置旋转角度,即旋转中心P与油缸上支点和油缸下支点所形成的角度,(°);M为油缸下支点,mm;N为油缸上支点,mm;M1为开沟装置恰好抬离地面时,油缸下支点的位置,mm;Q为尾轮中心点;Q1为开沟装置恰好抬离地面时尾轮中心点的位置。
Figure 9. Trenching device motion schematic diagram
Note: P is the rotation centerline; h is the maximum working depth, mm; g is the distance from point on top of hydraulic cylinder to rotational center, mm; e is the distance from point on bottom of hydraulic cylinder to rotational center, mm; D is the length of support beam, mm; h1 is the vertical distance from center of the tail wheel to rotation center when trenching device is just lifted off the ground, mm; l1 is the length when hydraulic cylinder is fully extended, mm; l2 is the length when hydraulic cylinder is fully retracted, mm; μ is the angle that trenching device rotates from the maximum working depth to just lifting off the ground, (°) ; w is the roteted angle of trenching device, et the angle formed bettween rotation center P and the top and bottom points of hydraulic cylinder, (°); M is the point on bottom of hydraulic cylinder, mm; N is the point on top of hydraulic cylinder, mm; M1 is the position of the point on top of hydraulic cylinder when trenching device just lifts off the ground, mm; Q is the center point of the tail wheel; Q1 is the position of the center point of the tail wheel when the trenching device just lifts off the ground.
![]()
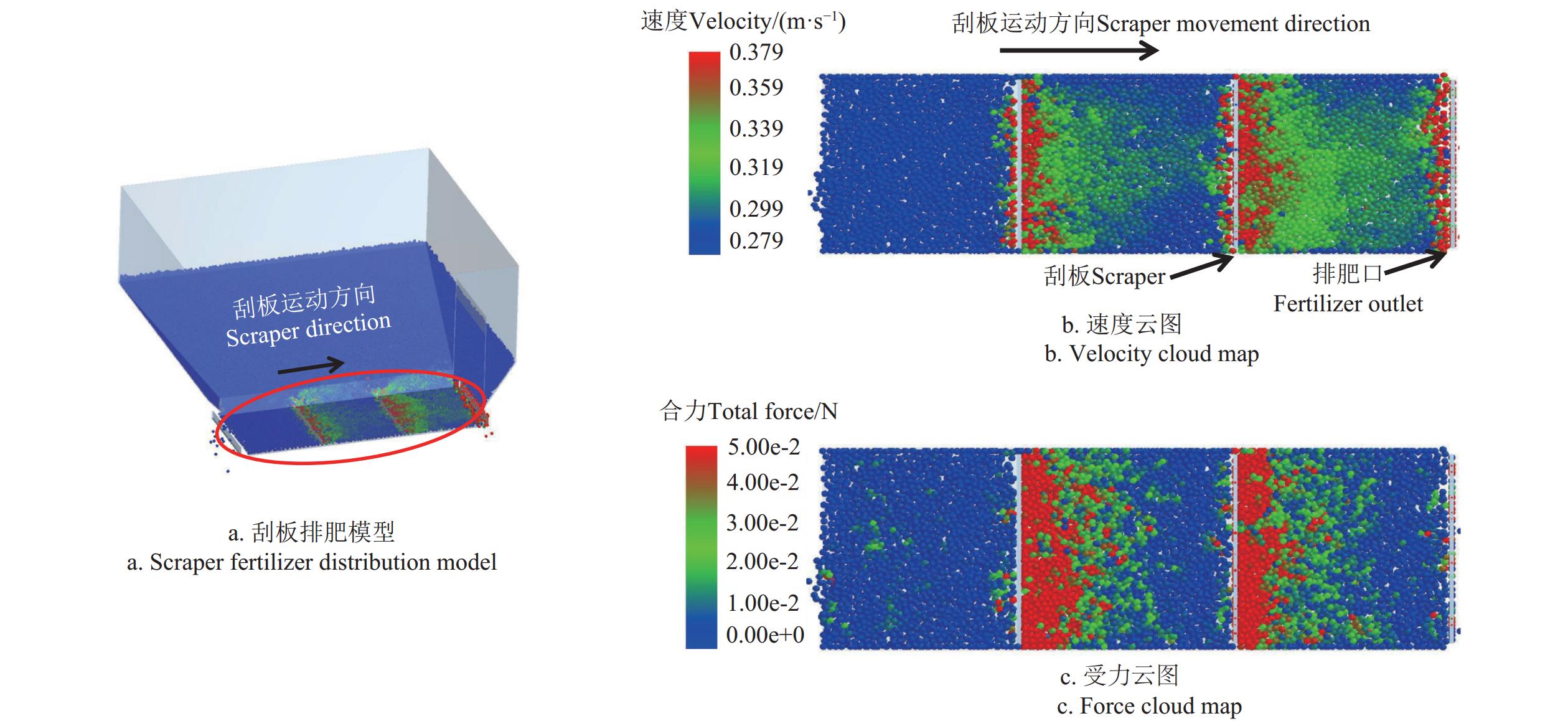
图 11 有机肥排肥速度和受力云图
Figure 11. Organic fertilizer spreading velocity and force cloud map
![]()
图 12 两种施肥模式下排肥仿真结果
Figure 12. Simulation results of discharged fertilizers under two fertilization modes
![]()
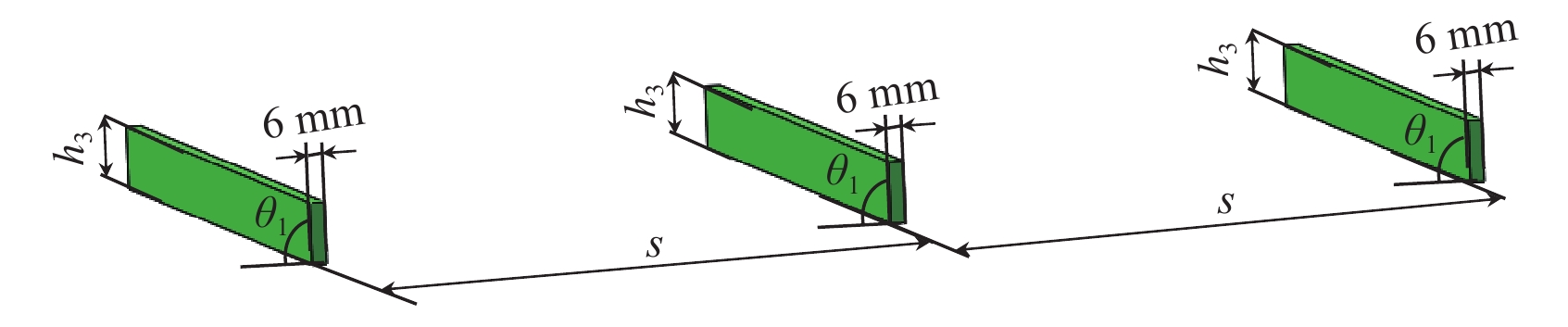
图 13 刮板结构参数示意图
注:h3为刮板高度,mm;s为刮板间距,mm;θ1为刮板倾角,(°)。
Figure 13. Schematic diagram of scraper structural parameters
Note: h3 is the scraper height, mm; s is the distance between scrapers, mm; θ1 is the scraper inclination angle, (°).
![]()
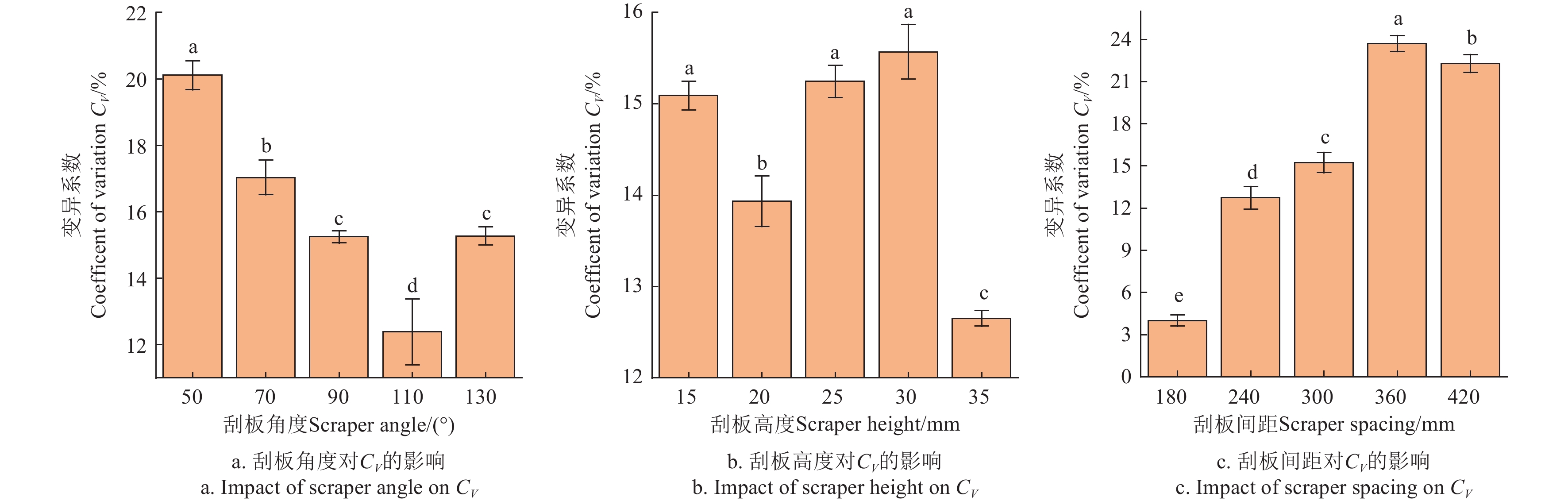
图 14 刮板参数对排肥均匀性变异系数的影响
注:误差棒为标准差;不同字母表示差异显著(P<0.05)。
Figure 14. Impact of scraper parameters on coefficient of variation of fertilizer distribution uniformity
Note: The error bars represent the standard deviation; different letters indicate significant differences (P<0.05).
表 1 链式反转开沟施肥机的主要技术参数
Table 1 Principal technical parameters of chain reversal trenching and fertilization device
参数Parameter 数值Value 配套动力Auxiliary power/ kW 60~80 外形尺寸(长×宽×高)Dimensions (length×width×height)/ mm×mm×mm 1700 ×1824×1525 作业速度Working speed/(km·h−1) 0.2~1.35 作业宽度Working width/mm 300 作业深度Working depth/mm 600 施肥量Fertilizer application rate/( kg·m−1) 0.8~6 肥箱容积Volume of fertilizer tank/m3 0.7  下载: 导出CSV
下载: 导出CSV
表 2 离散元仿真参数
Table 2 Discrete element simulation parameters
项目Items 离散元参数
Discrete element parameters数值
Values有机肥本征参数
Organic fertilizer intrinsic parameters剪切模量/Pa
泊松比
堆积密度/(g·cm−3)1 × 106
0.25
1.072有机肥-有机肥接触参数
Organic fertilizer- organic fertilizer
contact parameters恢复系数
静摩擦系数
滚动摩擦系数0.6
0.65
0.13钢的本征参数
Steel intrinsic parameters泊松比
剪切模量/×1010 Pa
密度/(g·cm−3)0.3
7.94
7.85有机肥-钢接触参数
Organic fertilizer-steel contact parameters恢复系数
静摩擦系数
滚动摩擦系数0.6
0.7
0.11接触模型
Contact modelJKR/(J·m−2) 0.012 颗粒Particle 半径/mm 5
下载: 导出CSV
表 3 刮板试验因素水平表
Table 3 The levels of experimental factors for the scraper test
水平Level 刮板角度Scraper angle /(°) 刮板高度Scraper height/mm 刮板间距Scraper spacing/mm 1 50 15 180 2 70 20 240 3 90 25 300 4 110 30 360 5 130 35 420
下载: 导出CSV
表 4 排肥均匀性试验结果
Table 4 Test result of fertilizer distribution uniformity
试验
Test样本1
Sample 1/g样本2
Sample 2/g样本3
Sample 3/g样本4
Sample 4/g样本5
Sample 5/gCV/% 1 1323.3 1430.3 1138.7 1411.0 1517.0 9.41 2 1386.3 1395.9 1209.1 1435.6 1419.7 5.98 3 1350.6 1499.8 1540.2 1187.4 1280.5 9.64
下载: 导出CSV
表 5 排肥量试验结果
Table 5 Test result of fertilizer application rate
项目
Items试验号
Test No.样本1
Sample 1/g样本2
Sample 2/g样本3
Sample 3/g样本4
Sample 4/g样本5
Sample 5/g平均值
Average/g最小排肥量
Minimum fertilizer application rate1 498.1 554.4 385.6 408.5 360.7 448.6 2 410.3 604.3 347.5 429.6 487.2 最大排肥量
Maximum fertilizer application rate1 3210.2 2987.5 3541.2 3695.1 3200.6 3273.5 2 2804.5 3102.9 3847.2 3365.2 2980.7
下载: 导出CSV
表 6 作业稳定性试验结果
Table 6 Test result of working stability
作业行
Working rows参数
Parameter目标值
Target value /mm试验数据Test date/mm 平均值
Mean value /mm平均相对误差
Mean relative error/%稳定性系数
Stability coefficient /%1 2 3 4 5 1 作业深度 600 603 682 580 620 595 616.0 2.7 93.57 作业宽度 300 312 291 321 298 305 305.4 1.8 96.16 2 作业深度 600 697 598 576 614 637 624.4 4.1 92.58 作业宽度 300 302 287 310 304 274 295.4 1.5 95.04
下载: 导出CSV
-
[1] 李同玺,张猛强,牛浩,等. 果园施肥机关键技术研究现状与展望[J]. 新疆农机化,2023(3):24-26. LI Tongxi, ZHANG Mengqiang, NIU Hao, et al. Research status and prospect of key technology of orchard fertilizer[J]. Xinjiang Agricultural Mechanization, 2023(3): 24-26. (in Chinese with English abstract)
[2] 白秋薇,张信,罗红品,等. 设施果园自动对靶精准变量施肥控制系统[J]. 农业工程学报,2021,37(12):28-35. doi: 10.11975/j.issn.1002-6819.2021.12.004 BAI Qiuwei, ZHANG Xin, LUO Hongpin, et al. Control system for auto-targeting precision variable-rate fertilization of fruit trees in a greenhouse orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(12): 28-35. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2021.12.004
[3] 方啸宇,徐文清,刘文,等. 巨峰葡萄9种元素缺素症的研究[J]. 核农学报,2024,38(6):1196-1204. FANG Xiaoyu, XU Wenqing, LIU Wen, et al. Study of 9 kinds of nutrient deficiencies on kyoho grape[J]. Journal of Nuclear Agricultural Sciences, 2024, 38(6): 1196-1204. (in Chinese with English abstract)
[4] 王斌,李云,李瑞鹏,等. 基于最小数据集的集约化葡萄园土壤健康评价[J]. 农业工程学报,2024,40(8):71-79. doi: 10.11975/j.issn.1002-6819.202310029 WANG Bin, LI Yun, LI Ruipeng, et al. Soil health evaluation in the intensive vineyard based on minimum data set[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2024, 40(8): 71-79. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.202310029
[5] 魏智博,周高兴,李欣,等. 锯末堆肥对阿克苏地区苹果叶片养分、果实品质及果园土壤养分的影响[J]. 南方农业,2024,18(1):122-128. [6] GUAN Z, MU S, JIANG T, et al. Development of centrifugal disc spreader on tracked combine harvester for rape undersowing rice based on DEM[J]. Agriculture, 2022, 12(4): 562. doi: 10.3390/agriculture12040562
[7] 孙锦秀. 有机肥撒施机研究现状及发展对策[J]. 农机使用与维修,2023(7):90-93. SUN Jinxiu. Research status and development countermeasures of organic fertilizer spreader[J]. Agricultural Machinery Use and Maintenance, 2023(7): 90-93. (in Chinese with English abstract)
[8] 沈从举,张立新,周艳,等. 自走式果园气爆深松施肥机打穴机构运动学分析与试验[J]. 农业工程学报,2022,38(1):44-52. doi: 10.11975/j.issn.1002-6819.2022.01.005 SHEN Congju, ZHANG Lixin, ZHOU Yan, et al. Kinematic analysis and tests of the insertion mechanism of a self-propelled orchard gas explosion subsoiling and fertilizing machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(1): 44-52. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2022.01.005
[9] 赵淑红,张鑫,袁溢文,等. 粉末状有机肥条施排肥器设计与试验[J]. 农业机械学报,2022,53(10):98-107. ZHAO Shuhong, ZHANG Xin, YUAN Yiwen, et al. Design and experiment of powder organic fertilizer drilling fertilizer distributor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 98-107. (in Chinese with English abstract)
[10] 刘进宝,汤智辉,郑炫,等. 2FHF-4.56型宽行距作物基肥对行分层深施机设计与试验[J]. 农业工程学报,2022,38(6):1-11. doi: 10.11975/j.issn.1002-6819.2022.06.001 LIU Jinbao, TANG Zhihui, ZHENG Xuan, et al. Design and experiments of the 2FHF-4.56 type base-fertilizer row-following and layered deep fertilizing machine for wide row spacing crops[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(6): 1-11. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2022.06.001
[11] 张宏建,徐春保,刘双喜,等. 自动调节深度式果园双行开沟施肥机设计与试验[J]. 农业机械学报,2021,52(1):62-72. ZHANG Hongjian, XU Chunbao, LIU Shuangxi, et al. Design and experiment of orchard ddouble row ditching-fertilizer machine with automatic depth adjustment[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 62-72. (in Chinese with English abstract)
[12] WANG J, XU Y, WANG C, et al. Design and simulation of a trenching device for rice straw burial and trenching based on MBD-DEM[J]. Computers and Electronics in Agriculture, 2023, 207: 107722. doi: 10.1016/j.compag.2023.107722
[13] 谭好超,徐丽明,马帅,等. 刮板式有机肥条铺与旋耕混合施肥机设计与试验[J]. 农业机械学报,2022,53(11):163-175. doi: 10.6041/j.issn.1000-1298.2022.11.016 TAN Haochao, XU Liming, MA Shuai, et al. Development and experiment of scraper organic fertilizer strip spreading and rotary tillage mixed fertilizer applicator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(11): 163-175. (in Chinese with English abstract) doi: 10.6041/j.issn.1000-1298.2022.11.016
[14] 谢金泉,王新章. 链齿式开沟机工作部件的初步研究[J]. 江西农业大学学报,1992(2):161-164. [15] YANG Y, HU Z, GU F, et al. Simulation and experimental study of the tillage mechanism for the optimal ddesign of wheat rotary strip-tiller blades[J]. Agriculture, 2023, 13(3): 632. doi: 10.3390/agriculture13030632
[16] ZHANG L, ZHAI Y, WU C, et al. Modeling the interaction between a new four-bar subsoiling mechanism and red soil using the improved differential evolution algorithm and DEM[J]. Computers and Electronics in Agriculture, 2023, 208: 107783. doi: 10.1016/j.compag.2023.107783
[17] SUN Y, GUO C, LI Q, et al. Optimization of rock cutting process parameters with disc cutter for wear and cutting energy reduction based on the discrete element method[J]. Journal of Cleaner Production, 2023, 391: 136160. doi: 10.1016/j.jclepro.2023.136160
[18] DU J, HENG Y, ZHENG K, et al. Investigation of the burial and mixing performance of a rotary tiller using discrete element method[J]. Soil and Tillage Research, 2022, 220: 105349. doi: 10.1016/j.still.2022.105349
[19] 杜文斌,周国威,张青松,等. 油菜直播组合式埋茬防堵装置设计与试验[J]. 农业工程学报,2024,40(5):54-64. DU Wenbin, ZHOU Guowei, ZHANG Qingsong, et al. Design and experiments of anti-blocking device combined stubble burying for rapeseed direct seeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2024, 40(5): 54-64. (in Chinese with English abstract)
[20] 袁全春,徐丽明,邢洁洁,等. 机施有机肥散体颗粒离散元模型参数标定[J]. 农业工程学报,2018,34(18):21-27. doi: 10.11975/j.issn.1002-6819.2018.18.003 YUAN Quanchun, XU Liming, XING Jiejie, et al. Parameter calibration of discrete element model of organic fertilizer particles for mechanical fertilization[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 21-27. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2018.18.003
[21] 袁全春,徐丽明,牛丛,等. 果园有机肥深施机土肥混合分层回填装置研制[J]. 农业工程学报,2021,37(5):11-19. doi: 10.11975/j.issn.1002-6819.2021.05.002 YUAN Quanchun, XU Liming, NIU Cong, et al. Development of soil-fertilizer mixing layered backfiller for organic fertilizer deep applicator in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(5): 11-19. (in Chinese with English abstract) doi: 10.11975/j.issn.1002-6819.2021.05.002
[22] ZHANG X, PEI Y, CHEN Y, et al. The design and experiment of vertical variable cavity base fertilizer fertilizing apparatus[J]. Agriculture, 2022, 12(11): 1793. doi: 10.3390/agriculture12111793
[23] LEI X, WU W, DENG X, et al. Determination of material and interaction properties of granular fertilizer particles using DEM simulation and bench testing[J]. Agriculture, 2023, 13(9): 1704. doi: 10.3390/agriculture13091704
[24] WANG B, CHE G, WAN L, et al. Design and experiment of impeller type variable fertilizer discharger device based on EDEM simulation[J]. Inmateh Agricultural Engineering, 2023, 71(3): 734-744.
[25] GALVAO C B, ALBIERO D, GARCIA A P, et al. Fertilizer metering mechanism with helical conic cylindrical thread for family agriculture[J]. Engenharia Agricola, 2018, 38(6): 934-940. doi: 10.1590/1809-4430-eng.agric.v38n6p934-940/2018
[26] 牛丛. 北方露地葡萄防寒布辅助越冬的柔性清土与平整卷布技术和装置研究[D]. 北京:中国农业大学,2023. NIU Cong. Research on Flexible Soil-clearing and Smoothly Cloth-winding Technology and Device for Norththern Open-field Grape Overwintered on Cold-proof Cloth [D]. Beijing: China Agricultural University. 2023. (in Chinese with English abstract)
[27] 袁全春. 果园自发酵有机肥分层施用技术与装备研究[D]. 北京:中国农业大学,2021. YUAN Quanchun. Study on the Technology and Equipment of Self-fermented Organic Fertilizer Layered Application in Orchard[D]. Beijing: China Agricultural University. 2021. (in Chinese with English abstract)
[28] LIU D, GONG Y, ZHANG X, et al. EDEM simulation study on the performance of a mechanized ditching device for codonopsis planting[J]. Agriculture, 2022, 12(8): 1238. doi: 10.3390/agriculture12081238
[29] CHEN W, REN J, HUANG W, et al. Design and parameter optimization of a dual-disc trenching device for ecological tea plantations[J]. Agriculture, 2024, 14(5): 704. doi: 10.3390/agriculture14050704
[30] 张宏建. 现代苹果园双行开沟施肥机关键技术及试验研究[D]. 泰安:山东农业大学,2021. ZHANG Hongjian. Research on Key Technologies and Experiments of Double Row Ditching-fertilizer Machine for Modern Apple Orchards [D]. Tai'an: ShanDong Agricultural University. 2021. (in Chinese with English abstract)













计量
- 文章访问数: 300
- HTML全文浏览量: 31
- PDF下载量: 112





