
Constructing a crown width prediction model for Pinus koraiensi using BLS data
-
摘要:
为预测人工红松冠幅,该研究利用背包式激光雷达(backpack laser scanning, BLS)提取各单木因子并构建人工红松冠幅预测模型。结果表明:BLS点云数据与实测数据平均匹配率达到98.5%,显示出较高的准确度。点云数据与实测胸径的RMSE均值为0.924,R2均在0.9以上,表现出较强的相关性;与实测树高的RMSE均值为2.067 ,R2均在0.650以上,相关性较弱;与实测树冠的RMSE均值为0.376,R2均在0.8以上,相关性较强。在模型拟合方面,二次型函数的基础模型拟合和预估效果最好(R2a =
0.528 ,RMSE=0.718 ,MAE=0.580 ,MAPE=0.157 ),引入林分平均胸径、高径比和每公顷大于对象木断面积之和能够显著提升模型拟合检验精度。考虑样地作为随机效应的混合效应模型预测效果最好 (R2a =0.655 ,RMSE=0.620 ,MAE=0.484 ,MAPE=0.130 )。综上所述,结合BLS点云数据与测量数据构建冠幅预测模型具有一定的可行性,可以利用BLS辅助林业调查。Abstract:Backpack Laser Scanning (BLS), as a portable new laser radar technology, has been rarely applied in forestry surveys. This study aims to extract the individual tree factors and crown width of Pinus koraiensis using BLS. A crown width prediction model was then established using BLS data. 12 sample plots of Pinus koraiensis plantations were selected in Mengjiagang Forest Farm, Jiamusi City, Heilongjiang Province. Backpack laser scanning was utilized to acquire the point cloud data from these plots. The preprocessing steps included denoising, ground point normalization, and single tree segmentation. The processed point cloud data was then registered with the actual field measurements for the individual tree matching. Parameters of each single tree were extracted to calculate their extraction accuracies. A prediction model was then constructed for the crown width of Korean pine using extracted parameters. Eight commonly used crown width prediction models were evaluated to determine the best-performing as the basic model. Furthermore, a generalized model was obtained to incorporate the stand and single tree factors. Additionally, a nonlinear mixed prediction model was constructed for the crown width to consider the random effects at the plot level, particularly for the artificially cultivated Korean pine. The point cloud data from the backpack laser scanning was matched well with the actual field data, with an average matching rate of 98.5%. The accuracies of extraction were 0.964, 0.871, and 0.928 for the breast height diameter, tree height, and crown width, respectively. The extracted parameters of the point cloud showed significant correlations with the measured ones. The correlation coefficient (R2) between point cloud-extracted and field-measured breast height diameter was above 0.9 (0.904~0.973). The R2 between extracted and measured tree height was above 0.650 (0.650~0.740). The R2 between extracted and measured crown width was above 0.8 (0.817~0.888). A quadratic function-based model was provided for the best fitting and prediction (R2a= 0.528, RMSE = 0.718, MAE = 0.580 , and MAPE = 0.157). Stand mean diameter was introduced into the quadratic model at breast height, height-diameter ratio, and the total basal area per hectare of trees larger than the subject tree. The R2awas improved by 11.15%, whereas, the RMSE was reduced by 6.731%. A better performance was achieved in the mixed-effects model with sample plots as a random effect, compared with the basic model. The accuracies were ranked in the descending order of the nonlinear mixed model (R2a= 0.655, RMSE = 0.620, MAE = 0.484, and MAPE = 0.130), generalized model (R2a = 0.578, RMSE = 0.669, MAE = 0.501, and MAPE = 0.136), and basic model (R2a = 0.528, RMSE = 0.717, MAE = 0.580, and MAPE = 0.157). Backpack laser scanning shared better scanning effects on the breast height diameter, crown width, and tree height. The crown width prediction model with point cloud data can be expected to effectively predict the crown width of Pinus koraiensis. Point cloud data can be combined with field measurements to assist in forestry surveys using backpack laser scanning. The BLS can also be applied in dense forest stands and forestry surveys.
-
Keywords:
- laser radar /
- point cloud /
- Pinus koraiensis /
- crown-width /
- nonlinear mixed effects model.
-
0. 引 言
小麦是重要的粮食农作物之一,养育了全世界近三分之一的人口。小麦产量关系到国家粮食安全,小麦产量预测是进行农业生产管理决策的重要参考,因此,如何快速且准确地预估麦穗产量具有重要意义[1-2]。
传统图像处理方法是从麦穗图像中人工提取特征,如麦穗的形状、颜色及纹理等,然后通过分类器构建模型从而实现对图像中麦穗识别与计数[3-4]。FERNANDEZ-GALLEGO等[5]利用拉普拉斯频率滤波器去除麦穗图像中的高低频元素并使用中值滤波器去除高噪声,分割局部峰值完成对图像中麦穗的自动计数。刘哲等[6]改进Bayes抠图算法分割麦穗图像后采用图像滤波、二值化等方法分离出小穗实现麦穗小穗的自动计数。杜颖等[7]利用颜色特征识别并提取麦穗骨架,通过计算骨架角点实现麦穗的自动计数。但人工提取麦穗特征依靠经验丰富的专业人员且依赖麦穗图像质量,所以在复杂的田野环境中传统图像处理技术对麦穗的计数效果并不理想[8-9]。
目前,基于卷积神经网络的检测模型在麦穗检测与计数领域广泛应用。鲍文霞等[10]利用拥挤场景识别网络(CSRNet)生成的麦穗密度,根据密度图中所有密度值的总和,精确统计单位面积麦穗数。杨蜀秦等[11]设计单位面积小麦区域并加入特征重组上采样模块和注意力机制,提高模型精度。KHAKI等[12]提出了麦穗检测模型WheatNet,与传统预测框进行麦穗定位相比,该模型使用点标记麦穗目标并完成计数。黄硕等[13]在YOLOv5模型基础上,在颈网络输出分支加入混合注意力增强网络模型的感知能力,提高模型检测能力。这些方法为麦穗定位与计数提供了有效手段,但基于水平框的检测模型存在固有局限性,例如对遮挡和重叠目标处理能力弱、难以处理复杂背景环境等。
旋转目标检测通过带有旋转角度的矩形进行目标检测,能够获得目标的位置和方向信息,有效提高检测准确性和鲁棒性,在自动驾驶、遥感影像、工业检测和农业等领域有广泛的应用前景[14]。李朝辉等[15]利用多尺度技术检测不同尺度物体并加入了环形圆滑标签解决角度回归问题提高模型检测精度。为提高模型检测精度,庄文华等[16]采用瓶颈注意力加强对关键目标的特征提取能力,有效提高了模型的检测精度。SUN等[17]利用无人机拍摄田野麦穗图像,并提出改进的旋转框小麦头检测与计数模型,从俯视的角度对田野环境麦穗检测与计数。
旋转目标检测虽然在许多场景下取得了较为成功的应用,但田野环境光照、风速以及麦穗遮挡等因素导致麦穗检测与计数难度较大,因此在麦穗检测与计数任务中需要考虑以下3个方面的问题:1)麦穗受趋光特性或风的影响会倾斜生长出现重叠和遮挡,部分麦穗呈现不完整导致难以仅通过外形进行检测与计数;2)麦穗生理性差异,同种麦穗因为光照、湿度等环境因素出现大小及外形等性状差异,影响检测结果;3)田野环境的复杂性,风速以及光照导致采集的麦穗图像清晰度参差不齐,给麦穗检测与计数带来极大困难。为解决这些问题,本文拟采用Oriented R-CNN[18]作为检测模型并针对麦穗检测与计数场景进行研究与优化。
针对麦穗分布密集,外形与大小存在差异,环境复杂等问题,本文在主干网络加入跨阶段局部空间金字塔(SPPCSPC,spatial pyramid pooling cross stage partial networks)[19]模块扩大模型感受野,加强对麦穗特征提取能力,增强网络感知能力;同时,在颈网络中引入路径聚合网络(PANet,path aggregation network)[20]并在特征融合分支加入混合注意力机制(E2CBAM,efficient two convolutional block attention module)丰富特征图包含的麦穗特征信息;最后使用柔性非极大值抑制算法(Soft-NMS,soft-non maximum suppression)[21]优化预测框筛选流程,避免因麦穗遮挡导致漏检,以期满足复杂环境下麦穗的精准快速检测与计数任务需求,为实际观察麦穗长势及数量统计提供一定的技术参考与指导。
1. 材料与方法
1.1 试验数据
1.1.1 数据收集与分析
试验材料选取全球小麦数据集[22](GWHD,https://www.kaggle.com/competitions/global-wheat-detection/data.)和南京白马镇麦穗图像,其中arvalis_1、arvalis_2、arvalis_3以及inrae_1种类的麦穗图像拍摄于法国;enthz_1种类的麦穗图像拍摄于瑞士;rres_1种类的麦穗图像拍摄于英国;Usask_1种类的麦穗图像拍摄于加拿大,将南京白马镇采集麦穗图像作为验证集检验模型鲁棒性。所选取样本包含多角度、多位置、环境多样、背景复杂的麦穗图像,如图1所示。共选取分辨率1 024×1 024像素PNG格式图像共1 000张。
由于麦穗形状狭长、分布密集,采用旋转框标注能更准确地表示麦穗区域,避免框内包含更多背景,两种标注的效果对比如图2所示。表1统计了采用水平框(HBB)与旋转框(OBB)标注的麦穗平均像素面积,在7类小麦图像中,旋转框使得麦穗标注的像素面积至少减少30.57%,种类为arvalis_2的麦穗标注框面积更是减少了62.63%,因此旋转框标注能更准确地获得麦穗特征,减少背景和相邻目标的干扰。
![]() 图 2 水平框与旋转框视觉效果对比Figure 2. Comparison of the visual effect of horizontal bounding boxes and oriented bounding boxes表 1 水平框与旋转框平均面积差异Table 1. Difference of average area of horizontal and oriented bounding boxes
图 2 水平框与旋转框视觉效果对比Figure 2. Comparison of the visual effect of horizontal bounding boxes and oriented bounding boxes表 1 水平框与旋转框平均面积差异Table 1. Difference of average area of horizontal and oriented bounding boxes麦穗种类
Wheat variety平均面积Average area (HBB-OBB)/
HBB/%水平框(HBB)
Horizontal bounding boxes旋转框(OBB)Orientation bounding boxes arvalis_1 4442.3 1961.4 55.85 arvalis_2 5918.8 2212.1 62.63 arvalis_3 9851.0 5568.7 43.47 ethz_1 3334.5 2315.0 30.57 inrae_1 14867.3 6164.4 58.54 rres_1 6140.4 3816.4 37.85 usask_1 12790.2 5412.4 57.68 注:arvalis_1~arvalis_3以及inrae_1麦穗拍摄于法国;enthz_1麦穗拍摄于瑞士;rres_1麦穗拍摄于英国;Usask_1麦穗拍摄于加拿大。
Note: arvalis_1 ~ arvalis_3 and inrae_1 wheat were taken in France; enthz_1 wheat was taken in Switzerland; rres_1 wheat was taken in England; Usask_1 wheat was taken in Canada.1.1.2 数据集构建
本试验采用roLabelImg标注工具对原始图片中每个麦穗目标所在的区域进行旋转框标注并注明其所属类别,按照PASCAL VOC格式生成标注文件(.xml),旋转框标注信息表示为(x,y,w,h,θ)分别表示框中心点坐标(x,y)、宽和高(w,h)以及相较于水平框的旋转角度θ。因模型训练需要,将PASCAL VOC标注文件(.xml)转化为DOTA标注文件(.txt),旋转框的位置采用八参数即4个顶点坐标(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)表示。将构建的旋转框标注全球小麦数据集(RGWHD)按照7:1:2的比例随机分为训练集、验证集和测试集。
1.2 基于改进Oriented R-CNN的麦穗检测模型构建
Oriented R-CNN是目前旋转目标检测算法领域中检测精度相对较高的两阶段检测模型,其主要结构包括输入端数据预处理、主干网络(Backbone)、颈网络(Neck)、区域候选网络(Rotated RPN, rotated region proposal network)、头部网络(Head)。在模型预处理阶段采用图像旋转等策略增强数据集样本多样性;主干网络Backbone使用ResNet-50[23]网络对图像进行特征提取,其核心思想是残差学习,在残差结构中添加跨层链接,通过堆叠残差模块构建深度网络,解决梯度不稳定问题;颈网络Neck采用特征金字塔网络(FPN, feature pyramid network),通过融合不同尺度的特征图,丰富了特征图中所包含的语义和目标位置信息;区域候选网络(Rotated RPN)在特征图上生成尺度不同的建议框;头部网络(Head)将特征图信息与建议框信息整合输入至ROI层后经过全连接层得到模型的输出信息。
在田野环境中,针对麦穗目标小、遮挡导致模型精度不理想的问题,提出一种改进Oriented R-CNN的检测模型,结构如图3所示,在特征提取网络ResNet-50中引入跨阶段局部空间金字塔模块SPPCSPC增大感受野,提升模型对小目标的检测能力;此外,为了进一步提高模型特征学习能力,在颈网络FPN加入路径聚合网络PANet和混合注意力机制E2CBAM丰富特征图中所包含的特征信息;最后,针对小目标检测,采用柔性非极大值抑制算法Soft-NMS优化预测框的筛选过程,避免部分预测框因筛选算法被误删导致小目标漏检。
![]() 图 3 改进后的Oriented R-CNN结构注:P2、P3、P4、P5、C2、C3、C4、C5和C6表示特征图;变量(x,y,w,h)表示框的中心点坐标以及宽高;△α和△β表示边中点偏移量;θ表示边界框回归角度;SPPCSPC代表跨阶段局部特征金字塔模块;E2CBAM代表混合注意力模块。Figure 3. Improved Oriented R-CNN structureNote: P2, P3, P4, P5, C2, C3, C4, C5 and C6 represent feature maps; The variables (x,y,w,h) represent the center point coordinates of the frame and its width and height; △α and △β represent the offset of the edge midpoint; θ represents the boundary box regression angle; SPPCSPC stands for spatial pyramid pooling cross stage partial networks; E2CBAM stands for hybrid attention mechanism module.
图 3 改进后的Oriented R-CNN结构注:P2、P3、P4、P5、C2、C3、C4、C5和C6表示特征图;变量(x,y,w,h)表示框的中心点坐标以及宽高;△α和△β表示边中点偏移量;θ表示边界框回归角度;SPPCSPC代表跨阶段局部特征金字塔模块;E2CBAM代表混合注意力模块。Figure 3. Improved Oriented R-CNN structureNote: P2, P3, P4, P5, C2, C3, C4, C5 and C6 represent feature maps; The variables (x,y,w,h) represent the center point coordinates of the frame and its width and height; △α and △β represent the offset of the edge midpoint; θ represents the boundary box regression angle; SPPCSPC stands for spatial pyramid pooling cross stage partial networks; E2CBAM stands for hybrid attention mechanism module.1.2.1 主干网络中引入跨阶段局部空间金字塔模块
跨阶段局部空间金字塔(SPPCSPC, spatial pyramid pooling cross stage partial networks)模块是以空间金字塔池化模块(SPP, Spatial Pyramid Pooling)为基础,结合跨阶段局部网络(CSP, cross stage partial networks)[24]组合而成,如图4所示。CSP模块将主干网络提取的特征输入至卷积分支和SPP模块分支,最后将两个分支输出的特征图合并进行Concat操作进行特征融合,减少了模型一半计算量的同时提高了模型的速度及精度。
![]() 图 4 SPPCSPC模块结构注:k1表示卷积核大小等于1×1;k3表示卷积核大小等于3×3;s1表示步长为1;Pool 5、Pool 9、Pool 13分别表示最大池化的池化核大小为5、9、13;CBS模块中Conv表示卷积操作;BN表示批量归一化;SiLU是激活函数。Figure 4. Structure of the SPPCSPC moduleNote: k1 represents the convolution kernel_size=1×1; k3 represents the convolution kernel_size=3×3; s1 represents a step size of 1; Pool 5, Pool 9, and Pool 13 indicate that the max pool core size is 5, 9, and 13, respectively; In the CBS module, Conv represents the convolution operation; BN represents batch normalization; SiLU is the activation function.
图 4 SPPCSPC模块结构注:k1表示卷积核大小等于1×1;k3表示卷积核大小等于3×3;s1表示步长为1;Pool 5、Pool 9、Pool 13分别表示最大池化的池化核大小为5、9、13;CBS模块中Conv表示卷积操作;BN表示批量归一化;SiLU是激活函数。Figure 4. Structure of the SPPCSPC moduleNote: k1 represents the convolution kernel_size=1×1; k3 represents the convolution kernel_size=3×3; s1 represents a step size of 1; Pool 5, Pool 9, and Pool 13 indicate that the max pool core size is 5, 9, and 13, respectively; In the CBS module, Conv represents the convolution operation; BN represents batch normalization; SiLU is the activation function.该操作过程细化为:
1)将主干网络所提取的特征图分别输入至两分支,其中,SPP模块分支首先对输入特征图进行1×1以及3×3的卷积处理提取特征,然后输入至SPP模块进行池化操作处理,最后再通过3×3的卷积提取特征;卷积分支只对输入特征图进行1×1的卷积处理。
2)将两分支的输出特征图进行Concat操作后再经过1×1的卷积模块处理调整输出通道,输出包含更多特征信息的不同尺度特征图。
在上述过程中,1×1的卷积模块主要目的是为了调整特征图的通道数,3×3的卷积模块用于减少因池化处理造成的特征信息丢失,丰富特征图语义信息。卷积分支主要作用是避免提取过多重复梯度信息同时减少网络传播过程中的梯度信息损失。
SPP模块由4个最大池化层分支组成,其池化核大小分别为5、9、13和1,4种池化核大小不同的最大池化分支能扩大感受野,使其能够处理不同尺度的感受野对象,能够更好的区分样本中大目标与小目标。
1.2.2 颈网络中引入路径聚合网络及混合注意力模块
传统特征金字塔网络FPN建立了自顶向下的特征融合通道,高层特征图所包含的语义信息和目标位置信息得以传递给低层特征图,使得模型可以学习到更多的目标特征从而提高检测精度。
为了应对田野环境中小麦头部分布不均匀且重叠导致检测精度不理想的情况,引入了路径聚合网络结构(PANet),该网络在FPN的基础之上搭建了自底向上的信息传递通道,有效解决了FPN网络单向信息传递导致低层特征图所包含的信息无法传递给高层特征图的难题,进一步丰富了特征图中所包含的语义信息和目标位置信息,能够更好地满足实际麦穗检测任务对精度的需求。
为了充分利用主干网络提取的目标特征信息,在特征图融合阶段进一步增强上下文信息的交互,从而提高模型准确率。针对田野环境中麦穗目标小且分布密集的特点,在PANet网络结构特征图融合连接中添加E2CBAM混合注意力模块,使得整体网络模型获得更加充分的目标信息,避免小目标漏检,改进后的颈网络结构如图5所示。
![]() 图 5 改进后颈网络结构注:CONV1模块表示卷积核大小等于1×1,步长为1的卷积操作;CONV2模块表示卷积核大小等于3×3,步长为1的卷积操作;Upsample为上采样模块;Downsample为下采样模块;E2CBAM是引入的混合注意力机制;Concat是拼接操作。Figure 5. Structure of the improved neck networkNote: CONV1 module means a convolution operation with kernel_size=1×1 and stride is 1; CONV2 module means a convolution operation with kernel_size=3×3 and stride is 1;Upsample is an upsampling module; Downsample is a downsampling module; E2CBAM is the hybrid attention mechanism introduced; Concat is a concatenation operation.
图 5 改进后颈网络结构注:CONV1模块表示卷积核大小等于1×1,步长为1的卷积操作;CONV2模块表示卷积核大小等于3×3,步长为1的卷积操作;Upsample为上采样模块;Downsample为下采样模块;E2CBAM是引入的混合注意力机制;Concat是拼接操作。Figure 5. Structure of the improved neck networkNote: CONV1 module means a convolution operation with kernel_size=1×1 and stride is 1; CONV2 module means a convolution operation with kernel_size=3×3 and stride is 1;Upsample is an upsampling module; Downsample is a downsampling module; E2CBAM is the hybrid attention mechanism introduced; Concat is a concatenation operation.CBAM是WOO等[25]提出的一种混合注意力机制模块,从通道和空间两个作用域入手,对输入特征图先进行通道模块(CAM)处理后再通过空间注意力模块(SAM),实现端到端的混合注意力机制,其中CAM模块注重对特征图通道的分配关系;SAM模块使得模型更关注对目标类别判断的关键像素区域,减少对非重点像素区域的关注。
如图6所示,为了减少添加CBAM模块导致的增加模型参数量,在轻量化通道注意力模块(ECA)[26]基础之上,使用双分支轻量化通道注意力模块(E2CA)代替CAM提高模型对特征图通道的关注,最后与SAM组成轻量化混合注意力机制模块(E2CBAM),其模块结构表示为
![]() 图 6 混合注意力机制E2CBAM结构注:F表示原特征图;F'表示经过E2CA机制模块处理后的特征图;F"表示经过SAM模块处理后的特征图。Figure 6. Structure of hybrid attention mechanism E2CBAMNote: F represents the original feature map; F' represents the feature map after being processed by the E2CA mechanism module; F" represents the feature map after being processed by the SAM module.
图 6 混合注意力机制E2CBAM结构注:F表示原特征图;F'表示经过E2CA机制模块处理后的特征图;F"表示经过SAM模块处理后的特征图。Figure 6. Structure of hybrid attention mechanism E2CBAMNote: F represents the original feature map; F' represents the feature map after being processed by the E2CA mechanism module; F" represents the feature map after being processed by the SAM module.F′=Mc(F)⊗F,F″ (1) 式中 F 表示原特征图; F{'} 表示经过E2CA机制模块处理后的特征图; F{''}表示 F{'} 经过SAM模块处理后的特征图;{M_c}\left( F \right)为通道注意力图;{M_s}\left( F \right)为空间注意力图。
ECA使用1×1的卷积核代替全连接层,使得模型参数变小更加轻量。如图7所示,E2CA是由两个并行的ECA分支结构组成,首先将输入的特征图进行平均池化(最大池化),特征图从 \left[ {\boldsymbol{H},\boldsymbol{W},\boldsymbol{C}} \right] 的矩阵转变为 \left[ {\boldsymbol{1},\boldsymbol{1},\boldsymbol{C}} \right] 的特征向量;接着对特征图通道数进行计算得到自适应的一维卷积核的大小;然后利用计算得到的自适应卷积核进行一维卷积运算得到特征图每个通道对应的权重;最后使用归一化的权重值与原特征图在通道维度相乘得到通道加权后的特征图,实现流程表示为
![]() 图 7 E2CA模块结构注:kernel_sieze1、kernel_sieze2表示自适应卷积核;Sigmoid是激活函数;Add表示拼接操作。Figure 7. Structure of the E2CA moduleNote: kernel_sieze1, kernel_sieze2 represent adaptive convolution kernels; Sigmoid is the activation function; Add represents the concat operation.
图 7 E2CA模块结构注:kernel_sieze1、kernel_sieze2表示自适应卷积核;Sigmoid是激活函数;Add表示拼接操作。Figure 7. Structure of the E2CA moduleNote: kernel_sieze1, kernel_sieze2 represent adaptive convolution kernels; Sigmoid is the activation function; Add represents the concat operation.{M_c}\left( F \right) = {\text{σ }}({{\text{F}}_{conv1D}}\left( {{\text{AvgPool}}\left( x \right) + {\text{MaxPool}}\left( x \right)} \right) (2) 式中{\text{σ }}表示Sigmoid激活函数;{{\text{F}}_{conv1D}}表示自适应一维卷积变换;AvgPool和MaxPool分别表示平均池化和最大池化。自适应卷积核的大小计算式如下:
k = \varphi \left( c \right) = \left| {\frac{{\log _2^C}}{\gamma } + \frac{b}{\gamma }} \right|odd (3) 式中k表示卷积核大小,c表示特征图通道数,\left| . \right|odd表示取表达式最近的奇数值。将\gamma 和b分别设置为2和1用于改变特征图通道数c和自适应卷积核大小之间的比例关系。
如图8所示,SAM首先将输入的特征图分别经过最大池化和平均池化层在通道维度生成两个 \left[ {\boldsymbol{1},\boldsymbol{H},\boldsymbol{W}} \right] 的权重向量;接着对两个特征向量进行Concat拼接得到 \left[ {\boldsymbol{2},\boldsymbol{H},\boldsymbol{W}} \right] 的特征空间权重;然后经过卷积核大小为7×7的卷积层将特征图维度变为 \left[ {\boldsymbol{1},\boldsymbol{H},\boldsymbol{W}} \right] ,得到通道维度的空间权重;最后利用Sigmoid对空间权重归一化后与原图相乘,对空间位置特征进行加权得到新的特征图 \left[ {\boldsymbol{C},\boldsymbol{H},\boldsymbol{W}} \right] ,以上操作表示为
![]() 图 8 SAM模块结构注:Conv layer表示7×7的卷积层;σ表示Sigmoid激活函数。Figure 8. Structure of the SAM(Spatial attention module)Note: Conv layer represents a 7×7 convolutional layer; σ represents a Sigmoid activation function.
图 8 SAM模块结构注:Conv layer表示7×7的卷积层;σ表示Sigmoid激活函数。Figure 8. Structure of the SAM(Spatial attention module)Note: Conv layer represents a 7×7 convolutional layer; σ represents a Sigmoid activation function.{M_s}\left( F \right) = {\text{σ }}\left( {{f^{7 \times 7}}\left( {\left[ {{\text{AvgPool}}\left( F \right);{\text{MaxPool}}\left( F \right)} \right]} \right)} \right) (4) 式中{f^{7 \times 7}}表示卷积核大小为7×7的卷积运算。
1.2.3 柔性非极大值抑制算法
在田野环境中,麦穗分布密集且互相遮挡导致漏检情况比较多。传统的非极大值抑制算法NMS将预测框之间交并比大于所设阈值的其他预测框全部过滤,例如当两个麦穗之间重叠程度较高时,非极大值抑制算法NMS则会去除其中一个预测框从而导致另一个目标被漏检,NMS计算式如下:
{s_i} = \left\{ {\begin{array}{*{20}{c}} {{s_i},}&{\mathrm{iou}(M,{b_i}) < {N_t}} \\ {0,}&{\mathrm{iou}(M,{b_i}) \geqslant {N_t}} \end{array}} \right. (5) 式中{s_i}表示第i个预测框的得分,M为得分最高的预测框,{b_i}表示第i个预测框,{N_t}是所设预测框交并比阈值,iou表示M 与bi的交并比值。
柔性非极大值抑制算法(Soft-NMS,soft-non maximum suppression)采用更加柔和的边界框筛选算法,在对目标预测框重叠程度较高且超过所设阈值时,通过对目标预测框使用高斯加权修改其置信度值来保留该预测框而不是直接将其过滤,有效减少了目标重叠导致边界框被过滤导致的漏检问题,进而提高模型针对密集小目标的检测能力,Soft-NMS计算式如下:
{s_i} = \left\{ {\begin{array}{*{20}{c}} {{s_i},}&{\mathrm{iou}(M,{b_i}) < {N_t}} \\ {{s_i}(1 - \mathrm{iou}(M,{b_i})),}&{\mathrm{iou}(M,{b_i}) \geqslant {N_t}} \end{array}} \right. (6) 在Soft-NMS算法中,置信度高斯加权计算式如下:
{s_i} = {s_i}{\mathrm{e}^{ - \frac{{\mathrm{iou}{{(M,{b_i})}^2}}}{\partial }}},\forall {b_i} \notin D (7) 式中\partial 为高斯权重。Soft-NMS对超过阈值的重叠预测框采用“惩罚”方式对其重新赋置信度值而不是将其过滤。
1.3 模型的训练与试验
1.3.1 评价指标
本试验使用平均精度(average precision,AP)、平均精度均值(mean average precision, mAP)、模型参数量(parameters)以及计算量对模型性能进行评价,其中计算值需要先计算模型训练的准确率(precision, P)及召回率(recall, R)。
1.3.2 试验环境及训练参数
试验输入图片尺寸为1 024×1 024像素,模型训练超参数具体设置如下:优化器选择使用随机梯度下降法SGD并采用Momentum优化算法,其中动量衰减项设置为0.9,权重衰减因子默认为0.000 1,初始学习率设置为0.005,24轮次之后降为0.000 5,32轮次之后降为0.000 05,38轮次后降为0.000 001,共训练40轮次。
试验的硬件设备主要配置为i7-12700F和显存16GB的NVIDIA GeForce RTX 4080 GPU。所使用的操作系统为Windows 11且装有Python3.7和Pytorch1.12.1的环境。
2. 结果与分析
2.1 颈网络改进模块试验
本试验以Oriented R-CNN模型为基础,在不改变模型其他参数及结构的情况下,训练模型至收敛,模型性能的试验结果见表2。
表 2 嵌入不同模块后模型检测精度对比Table 2. Comparison of model detection accuracy with different modulesPANet CBAM E2CBAM 平均精度均值
Mean average
precision
mAP/%
Parameters
Pa/M浮点计算量
Floating-point
operations
FLOPs/G× × × 85.77 41.13 198.54 √ × × 85.96 44.47 223.92 √ √ × 86.12 44.71 223.97 √ × √ 86.27 44.67 223.97 注:“×”表示未采用该模块;“√”表示采用该模块,下同。 Note: "x" indicates that the module has is not used; "√" indicates that the module is used, the same as below. 在颈网络中引入路径聚合网络PANet,mAP提高了0.19个百分点,在此基础之上分别嵌入了CBAM以及E2CBAM,mAP分别提高了0.16和0.31个百分点,参数量分别上涨了0.24和0.20 M,模型浮点数计算量基本不发生变化。相较于CBAM,E2CBAM在计算量基本不变的前提下参数量不仅减少了0.04 M,并且mAP提高了0.15个百分点。
为了更直观地验证在颈网络中嵌入E2CBAM的优越性,在引入PANet的基础之上,利用热力图比较颈网络嵌入CBAM以及E2CBAM对麦穗目标特征的捕获能力,将颈网络输出特征图的c2层作为样本进行对比,试验结果如图9所示。
![]() 图 9 颈网络中嵌入不同注意力机制可视化结果Figure 9. Visualization results of different attention mechanisms embedded in the neck network
图 9 颈网络中嵌入不同注意力机制可视化结果Figure 9. Visualization results of different attention mechanisms embedded in the neck network由图9可知,加入PANet的颈网络在嵌入不同注意力模块后,网络对密集麦穗目标的特征信息捕获能力均有明显的提升,尤其在区分麦穗目标与背景上有了显著的提升。对比CBAM和E2CBAM,两种混合注意力机制能够有效将网络感兴趣目标范围控制在麦穗目标区域,但CBAM对于背景区域关注较少但对于目标区域的关注程度同样不高,而E2CBAM减少对背景区域的关注程度的同时,对目标区域的定位更加准确,证明了E2CBAM的优越性,所以研究采用E2CBAM模块增强模型对麦穗目标位置区域的关注程度。
2.2 改进模型消融试验
在Oriented R-CNN基础上,在主干网络Backbone中引入SPPCSPC模块增大感受野,增强模型对麦穗小目标的检测能力;在颈网络中添加PANet融合不同尺度的特征图,并嵌入E2CBAM模块使得模型更关注特征图中小目标位置,对麦穗目标定位更加准确;在筛选预测框时,采用Soft-NMS避免重叠的麦穗目标漏检。为验证3种改进策略对模型检测性能的作用,进行了消融试验,试验结果如表3所示。
表 3 改进模型消融试验结果Table 3. Ablation test results of the improved modelResNet+
SPPCSPCPANet+
E2CBAMSoft-NMS 精确率
Precision P/%
Recall R/%mAP/% × × × 65.69 90.60 85.77 √ × × 79.06 90.81 86.21 × √ × 82.09 90.29 86.27 × × √ 64.60 92.09 86.87 √ √ × 81.79 90.80 86.45 √ × √ 72.70 92.14 87.40 × √ √ 64.97 92.07 87.59 √ √ √ 72.50 92.54 87.79 由表3数据可知,采用原Oriented R-CNN模型,该模型在测试集上mAP为85.77%;在基准模型上在主干网络中使用SPPCSPC生成输出特征层P5,扩大了感受野使模型能够处理不同尺度的麦穗目标,mAP提高了0.44个百分点;在基准模型的基础上在颈网络中引入PANet,通过融合不同尺度的特征图丰富其所包含的特征信息,并在特征融合分支中加入E2CBAM模块,使得模型更关注麦穗目标位置区域,该改进策略使得模型mAP提高了0.50个百分点;在基准模型的基础上采用柔性非极大值抑制算法Soft-NMS,采用更友好的预测框筛选算法,有效避免了重叠麦穗漏检,mAP提高了1.10个百分点;分别将3种改进模块进行两两组合验证其组合有效性,相较于基准模型分别提高了0.68、1.63以及1.82个百分点;在基准模型的基础上嵌入3种改进模块,mAP最高,较原模型提高了2.02个百分点。通过消融试验证明3种改进模块均能够有效提高模型检测精度,并在共同使用时能够使得模型mAP达到最高值87.79%。
2.3 Oriented R-CNN改进前后试验结果
为了验证改进后模型在麦穗检测与计数任务中的表现,在测试集中7类麦穗样本(arvalis_1、arvalis_2、arvalis_3、ethz_1、inrae_1、rres_1、usask_1)中分别取20张图像,共计140张图像,这些样本在光照强度以及密集程度上存在差异以便更全面地评估改进后模型性能。原模型与改进后模型对比试验结果如图10所示,麦穗分布较为稀疏时,改进前后模型对麦穗的检测效果并无明显差距,两者都能较好的识别麦穗类别及位置;麦穗分布较为密集或环境明亮时,原模型在识别遮挡麦穗时出现漏检,而改进后的Oriented R-CNN模型检测效果有了明显提高;环境阴暗时,原模型在识别过程中出现漏检和误检,而改进后的Oriented R-CNN模型对麦穗的分类和定位能力均有所提高。
![]() 图 10 改进前后模型检测效果对比注:红色方框标记区域为漏检麦穗;蓝色圆圈标记为该麦穗的种类被误判;图中红色数字表示图片中麦穗总数;下同。Figure 10. Comparison of model detection effect before and after improvementNote: The red box marks the area where the wheat ear was missed; the blue circle marks the category of the ear that was misclassified; the number in red indicates the total number of ears in the picture; the same as blow.
图 10 改进前后模型检测效果对比注:红色方框标记区域为漏检麦穗;蓝色圆圈标记为该麦穗的种类被误判;图中红色数字表示图片中麦穗总数;下同。Figure 10. Comparison of model detection effect before and after improvementNote: The red box marks the area where the wheat ear was missed; the blue circle marks the category of the ear that was misclassified; the number in red indicates the total number of ears in the picture; the same as blow.在计数任务中,将预测框得分阈值设为0.7,成功地过滤了那些置信度较低的预测框。对比原Oriented R-CNN模型和改进后的模型麦穗预测结果,表4清晰展示了改进后的模型在试验中取得的显著优势。改进后的Oriented R-CNN模型所有类别麦穗计数总和的正确率超过90%。相较于原模型,改进后的模型计数准确率提高1.18个百分点,为实际应用提供了更可靠的结果。特别值得注意的是,针对arvalis_2类别,改进后的模型在计数正确率方面取得了显著的提升,比原模型高出5个多百分点,这突显了改进后模型在阴暗环境下检测性能的提高,为在复杂条件下的农田应用提供了更为精确的计数结果。
表 4 改进前后模型麦穗计数结果试验Table 4. Tests of modeled wheat count results before and after improvement麦穗种类
Wheat variety人工计数
Manual counting原模型
Original model改进后模型
Improved model计数
Counting准确率
Accuracy/%计数
Counting准确率
Accuracy/%arvalis_1 824 768 93.20 775 94.04 arvalis_2 389 303 77.89 325 83.55 arvalis_3 506 446 88.14 462 91.30 ethz_1 1469 1297 88.29 1314 89.45 inrae_1 371 348 93.80 345 92.99 rres_1 901 827 91.79 836 92.79 usask_1 614 549 89.41 541 88.11 总计Total 5074 4538 89.44 4598 90.62 2.4 不同检测模型的对比试验
将改进后的Oriented R-CNN模型与当前主流的5种旋转目标检测模型Gliding vertex[27]、R3 det[28]、Rotated Faster R-CNN[29]、S2anet[30]和Rotated Retinanet[31]进行对比试验,按照模型的训练策略分别训练5种模型,对比识别效果如图11所示,5种对比模型在检测图片边界目标时均出现漏检,因为边界附近麦穗目标通常是不完整,模型获取到的麦穗特征信息过少;此外,R3 det、Rotated Faster R-CNN以及Rotated Retinaent对重叠目标的检测效果也不理想,而改进后的Orieted R-CNN模型对于图像边界框附近的麦穗目标以及目标分布密集区域的遮挡麦穗均有着更强的识别能力,说明其对麦穗目标的特征提取能力更强,在实际的田野环境中具有更优异的检测精度。
表5为不同旋转目标检测模型性能指标对比,由表5可知,Gliding vertex、R3 det、Rotated Faster R-CNN、S2anet和Rotated Retinanet的mAP分别为82.80%、85.30%、83.85%、85.54%和83.67%,而改进的Oriented R-CNN模型mAP为87.79%,较其他5种对比模型分别提高了4.99、2.49、3.94、2.25和4.12个百分点。
表 5 不同模型试验结果对比Table 5. Comparison of test results of different models模型
ModelP/% R/% mAP/% Pa/M FLOPs/G 每秒帧数
Frames per second,
FPS/(帧·s−1)Gliding vertex 77.10 88.27 82.80 41.13 198.41 27.2 R3 det 21.66 90.46 85.30 41.72 331.72 16.6 Rotated Faster
R-CNN76.30 89.67 83.85 41.13 198.40 27.2 S2anet 34.54 90.91 85.54 38.56 196.81 22.7 Rotated Retinanet 27.64 89.96 83.67 41.13 198.54 20.1 Improved Oriented R-CNN 72.50 92.54 87.79 47.23 314.55 23.2 对比试验说明改进后模型在光照强度存在差异的田野环境中对分布不均匀且遮挡的麦穗目标有更好的识别能力,能够更好地满足实际麦穗检测与计数任务对模型精度的需求。
2.5 田野麦穗实例检测
将2020年4月份在南京白马镇所拍摄的麦穗图像输入改进模型,观察强光照、阴暗环境、麦穗分布密集和重叠的麦穗图像检测结果,如图12所示。检测结果为:强光照麦穗图像中35个麦穗检测到32个,误检1个;阴暗麦穗图像中30个麦穗检测到28个;密集麦穗图像中36个麦穗检测到35个;重叠麦穗图像中37个麦穗检测到35个;138个麦穗总计正确检测数量为130,计数准确率为94.20%。可知,改进后的Oriented R-CNN模型能够满足实际麦穗检测与计数任务需求,在阴暗、强光照、密集目标和遮挡等场景中表现良好。
3. 结 论
该研究改进Oriented R-CNN模型,满足田野复杂环境下的麦穗目标检测与计数,主要结论如下:
1)在主干网络ResNet中引入SPPCSPC金字塔模块生成主干网络输出层F5,通过最大池化操作,能够使模型处理不同尺度的感受野对象,对于麦穗目标有更强的检测能力,模型的mAP提高了0.44个百分点。
2)在颈网络FPN中加入路径聚合网络PANet并在特征融合分支中添加E2CBAM注意力模块,路径聚合网络通过添加自底向上的特征融合通道进一步丰富了特征图包含的特征信息,E2CBAM模块使模型注重对特征图通道分配关系,同时减少了对非重点的背景区域的关注,颈网络整体改进使得模型mAP提高0.50个百分点。
3)使用Soft-NMS算法优化模型预测框筛选过程,避免漏检。本文改进的Oriented R-CNN最终平均精度均值mAP为87.79%,与主流的旋转目标检测模型Gliding vertex、R3 det、Rotated Faster R-CNN、S2anet和Rotated Retinanet相比,mAP分别提高了4.99、2.49、3.94、2.25和4.12个百分点,能够较好满足实际麦穗检测与计数任务对检测模型精度的需求。
-
![]()
图 2 样线扫描图
注:①~⑨表示行走路线顺序。
Figure 2. Sample line scanning map
Note: ① to ⑨ indicate the order of the walking route.
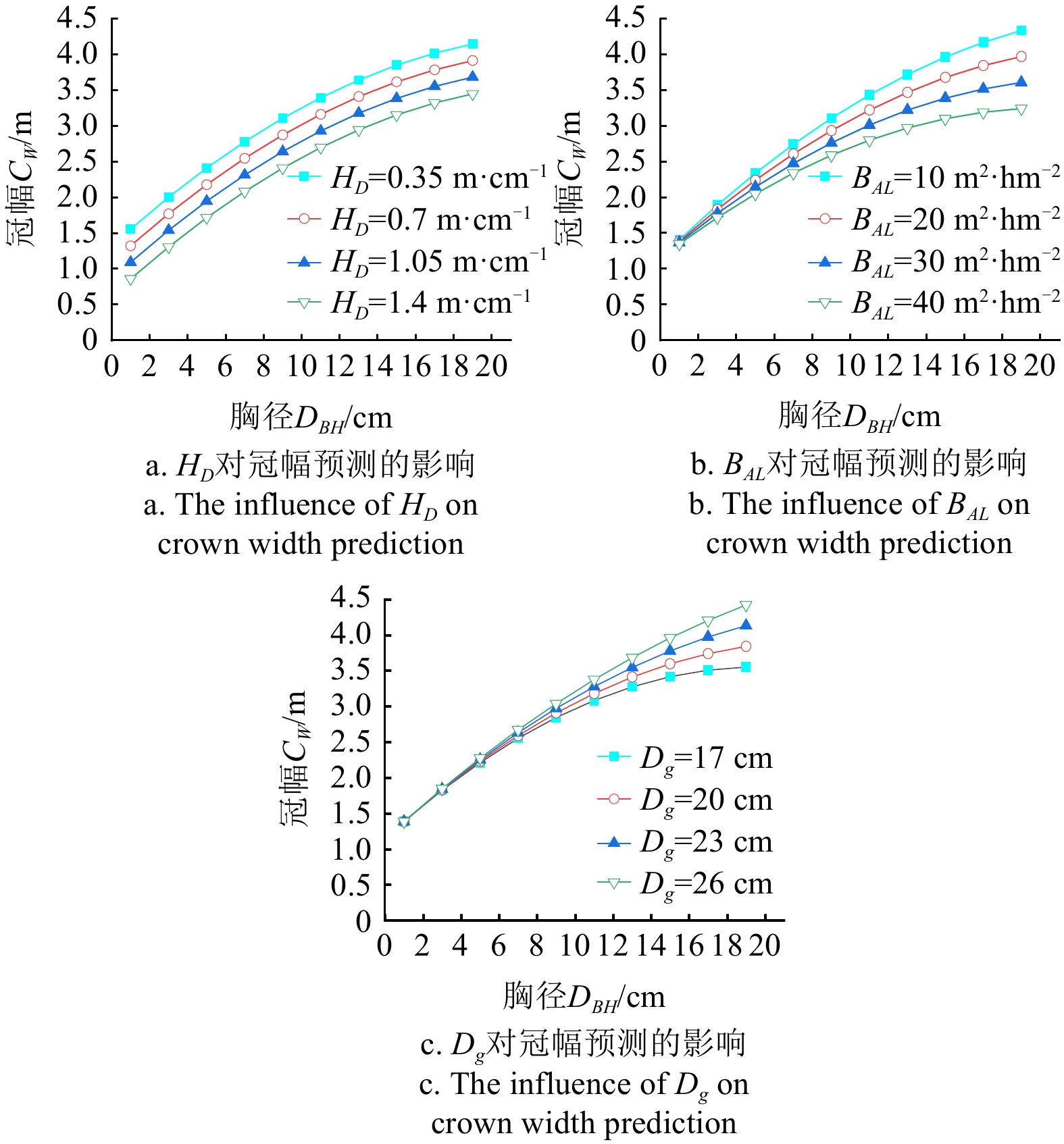
![]()
图 5 HD、BAL和Dg对冠幅预测的影响
Figure 5. The Influence of HD, BAL and Dg on crown width prediction
表 1 样地实测信息
Table 1 Actual measurement data of sample sites
编号
Number每公顷株数
Number of trees per hectare/tree树高
Tree height/
m冠幅
Crown width/m胸径Diameter breast height/
cm林龄
Forest age海拔Altitude/
m1 483 14.8 5.7 25.1 41 255.9 2 683 14.8 5.1 23.9 40 242.5 3 783 13.3 4.3 21.3 37 237.1 4 567 15.4 4.7 24.9 47 257.0 5 500 14.4 5.6 27.2 37 247.0 6 1183 16.6 3.4 21.2 46 228.0 7 1078 17.9 3.9 21.6 44 201.5 8 1367 12.0 3.3 17.5 38 233.0 9 844 13.6 4.3 22.8 40 262.8 10 883 14.2 4.6 22.5 39 260.5 11 1167 11.8 4.5 19.1 37 194.6 12 1033 14.3 4.1 19.3 32 222.6  下载: 导出CSV
下载: 导出CSV
表 2 基础模型拟合检验
Table 2 Basic functions fitting statistics
模型Model 表达式Expression 拟合数据Fitting data 检验数据 Validation data {R}_{a}^{2} RMSE/m MAE/m MAPE/m 线性Linear C_W={a}+{b}D_{BH} 0.527 0.720 0.582 0.158 幂函数Power C_W={a}D_{BH}^{{b}} 0.525 0.720 0.581 0.157 二次型Quadratic C_W={a}+{b}D_{BH}+{c}D_{BH}^2 0.528 0.718 0.580 0.157 对数型Logarithmic C_W={a}ln\left(D_{BH}\right)+{b} 0.490 0.747 0.578 0.158 逻辑斯蒂Logistic C_W={a}/\left(1+{b}\left(-{c}D_{BH}\right)\right) 0.526 0.720 0.590 0.159 指数型Exponential \mathrm{C}\mathrm{W}={a}e^{{b}D_{BH}} 0.528 0.718 0.585 0.158 豪斯费尔德Hossfeld C_W=\left({D}_{\mathrm{B}\mathrm{H}}/\left({a}+{b}D_{BH}\right)\right)^2 0.514 0.730 0.578 0.156 幂函数有截距Power(intercept) C_W={a}D_{BH}^{{b}}+{c} 0.529 0.718 0.585 0.158 注: {C}_{W} 代表冠幅,m; {D}_{BH} 代表胸径,cm;a、b、c为模型参数;Ra2为调整决定系数。 Note: CW represents crown width, m; DBH represents breast height diameter, cm; a, b, and c are model parameters in the table; Ra2 is adjust the coefficient of determination.
下载: 导出CSV
表 3 点云数据提取精度
Table 3 Point cloud data extraction accuracy
样地
Plot匹配率
Matching rate/%R2 RMSE H CW DBH H/m CW/m DBH/cm 1 100 0.698 0.868 0.946 2.147 0.374 0.591 2 100 0.712 0.861 0.916 2.254 0.367 1.134 3 100 0.740 0.888 0.904 1.454 0.341 0.914 4 100 0.718 0.859 0.951 2.412 0.415 0.838 5 100 0.720 0.873 0.962 2.039 0.423 0.866 6 97.2 0.660 0.822 0.933 3.127 0.381 1.214 7 99.0 0.650 0.817 0.953 3.216 0.325 1.222 8 96.3 0.730 0.837 0.973 1.401 0.318 0.879 9 97.3 0.740 0.883 0.945 1.466 0.424 0.883 10 98.1 0.693 0.857 0.955 2.097 0.421 0.914 11 97.0 0.730 0.855 0.953 1.142 0.321 0.885 12 96.7 0.670 0.834 0.931 2.045 0.401 0.745 平均值Average value 98.5 0.705 0.855 0.943 2.067 0.376 0.924 注:表中H代表树高,m。
Note: H represents tree height, m
下载: 导出CSV
表 4 相关性分析
Table 4 Correlation analysis
相关性Relevance CW H DBH HD Hg RH Dg RD DDOM SD BAL CW 1 H 0.148** 1 DBH 0.717** 0.417** 1 HD −0.628** 0.204** −0.745** 1 Hg 0.02 0.706** 0.300** 0.144** 1 RH 0.193** 0.703** 0.306** 0.123** 0 1 Dg 0.468** 0.369** 0.573** −0.322** 0.523** 0 1 RD 0.539** 0.255** 0.812** −0.699** 0 0.385** 0 1 DDOM 0.228** 0.444** 0.470** −0.138** 0.629** 0 0.819** 0 1 SD −0.534** −0.132** −0.502** 0.420** −0.187** 0 −0.875** 0 −0.485** 1 BAL −0.622** −0.07 −0.755** 0.699** 0.205** −0.318** −0.047 −0.875** 0.138** 0.211** 1 BAS −0.297** 0.454** −0.019 0.308** 0.643** 0 −0.032 0 0.405** 0.477** 0.363** 注:表中** 表示在0.01级别(双尾),相关性显著。HD代表高径比,m·cm−1;Hg代表林分平均树高,m;RH代表相对高;Dg代表林分平均胸径,cm;RD代表相对径;DDOM代表优势木平均胸径,cm;SD代表林分密度,株·hm−2;BAL代表每公顷大于对象木胸高断面积之和,m2·hm-2;BAS代表每公顷林分胸高断面积之和,m2·hm−2。 Note:** in the table indicates significant correlation at the 0.01 level (double tailed).HD stands for aspect ratio, m·cm−1; Hg represents the average tree height of the forest stand, m; RH represents relative height; Dg represents the average diameter at breast height of the forest stand, cm; RD represents the relative diameter; DDOM represents the average diameter at breast height of dominant trees, cm; SD represents stand density, 株 ·hm−2; BAL represents the sum of the cross-sectional areas greater than the height of the object's wood chest per hectare, m2/hm2; BAS represents the sum of breast height and basal area per hectare of forest stand, m2·hm−2.
下载: 导出CSV
表 5 不同随机效应参数拟合结果
Table 5 Fit different random effect parameters
随机效应参数Random effect parameters AIC BIC LL b 1007.43 1041.31 −495.715 a,f 1008.41 1050.75 −494.201 b,c,d 1017.03 1072.08 −495.513 注:AIC代表赤池信息准则,BIC代表贝叶斯信息准则,LL代表对数似然值。
Note: AIC represents the Akaike Information Criterion, BIC represents the Bayesian Information Criterion, and LL stands for the Log-Likelihood value.
下载: 导出CSV
表 6 模型参数估计与对比评价
Table 6 Model parameter estimation and comparative evaluation
项目
Project模型参数
Model parameter基础模型
Base model广义模型
Generalized mode非线性混合模型
Nonlinear mixed effect model固定效应参数
Fixed effect parametersa 1.1656 1.5496 0.8745 b 0.1077 0.2821 0.1613 c 0.0014 − 0.0107 − 0.0019 d − 0.6636 − 0.0204 e 0.0003 0.0001 f − 0.0019 − 0.0002 方差
variance{\sigma }_{u}^{2} 0.0002 {\sigma }^{2} 0.4886 0.4115 0.3848 {R}_{a}^{2} 0.5282 0.5871 0.6557 拟合数据
Fitting dataAIC 1116.69 1051.66 1007.43 BIC 1133.63 1081.30 1041.31 RMSE 0.7175 0.6692 0.620 检验数据
Validation dataMAE 0.5803 0.5016 0.484 MAPE 0.1571 0.1364 0.130 注: {\sigma }_{u}^{2} 为随机效应 \mu 的方差, {\sigma }^{2} 为残差方差。
Note: \sigma_{\mu}^2 is the variance of the random effect, ^{ }\sigma^2 is the residual variance.
下载: 导出CSV
-
[1] 赵婷婷. 塞罕坝华北落叶松人工林树冠生长模型研究[D]. 保定:河北农业大学,2024:20-30. ZHAO Tingting. Study on the Grown Model of the Crown of Larix principis-rupprechtiss Plantantion in Saihanba[D]. Baoding: Hebei Agricultural University, 2024: 20-30. (in Chinese with English abstract)
[2] 马爱云,李凤日,董利虎. 应用混合效应法建立的杂种落叶松人工林单木冠幅预测模型[J]. 东北林业大学学报,2021,49(3):9-14,38. MA Aiyun, LI Fengri, DONG Lihu. Individual crown diameter prediction for hybrid larch based on mixed effects models[J]. Journal of Northeast Forestry University, 2021, 49(3): 9-14, 38. (in Chinese with English abstract)
[3] 佟艺玟,陈东升,冯健,等. 基于线性分位数混合效应的辽东山区红松冠幅模型[J]. 应用生态学报,2022,33(9):2321-2330. TONG Yiwen, CHEN Dongsheng, FENG Jian, et al. Crown width model for planted Korean pine in eastern Liaoning mountains based on mixed effect linear quantile[J]. Chinese Journal of Applied Ecology, 2022, 33(9): 2321-2330. (in Chinese with English abstract)
[4] 闫瑾. 树冠火生长蔓延模型的改进与实时绘制算法研究[D]. 秦皇岛:燕山大学,2022:20-25. YAN Jin. Research on Improvement of Crown Fire Growth and Spread Model and Real-Time Rendering Algorith[D]. Qinghuangdao: Yanshan University, 2022: 20-25. (in Chinese with English abstract)
[5] 牟春杰. 单树树冠火发展及火行为特性研究[D]. 成都:西南交通大学,2022:15-35. MOU Chunjie. Study on The Development of Crown fire and the Characteristics of Fire Behavior[D]. Chengdu: Xinan Jiaotong University, 2022: 15-35. (in Chinese with English abstract)
[6] 常成. 基于树冠生长的油松人工林合理密度确定[D]. 北京:北京林业大学,2020:25-35. CHANG Cheng. Study on Determination of Optimum Stand Density of Planted Pinus tabulaeformis Forest Based on Crown Growth[D]. Beijing: Beijing Forestry University, 2020: 25-35. (in Chinese with English abstract)
[7] 邱思玉,孙玉军. 长白落叶松人工林单木冠幅模型[J]. 东北林业大学学报,2021,49(2):49-53. QIU Siyu, SUN Yujun. Individual tree crown width prediction models for Larix olgensis Plantation[J]. Journal of Northeast Forestry University, 2021, 49(2): 49-53. (in Chinese with English abstract)
[8] 王帆,贾炜玮,唐依人,等. 基于TLS的红松树冠半径提取及其外轮廓模型构建[J]. 南京林业大学学报(自然科学版),2023,47(1):13-22. WANG Fan, JIA Weiwei, TANG Yiren, et al. Extraction of crown radius and development of crown profile model of Pinus koraiensis based on TLS[J]. Journal of Nanjing Forestry University (Natural Sciences), 2023, 47(1): 13-22. (in Chinese with English abstract)
[9] 杨杰. 基于TLS数据的树木骨架提取与建模及其应用[D]. 南京:南京林业大学,2024. YANG Jie. Tree Skeleton Extraction and Modeling Based on TLS Data and Their Applications[D].Nanjing: Nanjing Forestry University, 2024. (in Chinese with English abstract)
[10] 张颖,贾炜玮. 基于地基激光雷达的落叶松人工林枝条因子提取和建模[J]. 应用生态学报,2021,32(7):2505-2513. ZHANG Ying, JIA Weiwei. Extraction of branch factors and model construction for Larix plantation using terrestrial laser scanning (TLS)[J]. Chinese Journal of Applied Ecology, 2021, 32(7): 2505-2513. (in Chinese with English abstract)
[11] LU Y, WANG L. Leveraging optimal UAV-lidar features for two CNN approaches to delineate mangrove tree crowns[J]. Remote Sensing Applications: Society and Environment, 2024, 35: 101260.
[12] 刘鲁霞,庞勇,李增元. 基于地基激光雷达的亚热带森林单木胸径与树高提取[J]. 林业科学,2016,52(2):26-37. LIU Luxia, PANG Yong, LI Zengyuan. Individual tree DBH and height estimation using terrestrial laser scanning (TLS) in a subtropical forest[J]. Scientia Silvae Sinica, 2016, 52(2): 26-37. (in Chinese with English abstract)
[13] 麻卫峰,吴小东,王冲,等. 地基激光雷达单木树冠体积提取球坐标积分法[J]. 自然资源遥感,2024,36(3) :81-87. MA Weifeng, WU Xiaodong, WANG Chong, et al. Extraction of individual tree crown volume by integrating spherical coordinates from TLS point cloud[J]. Remote Sensing for Natural Resources, 2024, 36(3) : 81-87. (in Chinese with English abstract)
[14] 蔡硕. 基于地基激光雷达和背包式激光雷达林木胸径提取[D]. 哈尔滨:东北林业大学,2021:15-30. CAI Shuo. Extraction of Tree Diameter at Breast Height Based on Terrestrial Laser Scanning and Backpack Laser Scanning[D]. Haerbin: Northeast Forestry University, 2021: 15-30. (in Chinese with English abstract)
[15] 张信杰,郑焰锋,温坤剑,等. 融合机载和背包激光雷达的桉树单木因子估测[J]. 林草资源研究,2022(6):131-137. ZHANG Xingjie, ZHENG Yanfeng, WEN Kunjian, et al. Estimation of single tree factor of eucalyptus by merging airborne and Backpack LIDAR[J]. Forest and Grassland Resources Research, 2022(6): 131-137. (in Chinese with English abstract)
[16] 唐佳俊,汪刚,柴宗政. 基于机载激光雷达点云数据的马尾松单木材积估测[J]. 林草资源研究,2023(6):105-112. TANG Jiajun, WANG Gang, CHAI Zongzheng. Single-tree volume estimation of Pinus massoniana based on airborne LIDAR point cloud[J]. Forest and Grassland Resources Research, 2023(6): 105-112. (in Chinese with English abstract)
[17] 杨军,王帆,宋仲禹. 基于背包激光雷达构建天然林蒙古栎胸径-树高模型[J]. 森林工程,2023,39(5):57-64. YANG Jun, WANG Fan, SONG Zhongyu. Development of natural forest Quercus mongolica diameter-height curve model based on BLS[J]. Forest Engineering, 2023, 39(5): 57-64. (in Chinese with English abstract)
[18] 黄旭,贾炜玮,王强,等. 背包式激光雷达的落叶松单木因子提取[J]. 森林工程,2019,35(4):14-21. HUANG Xu, JIA Weiwei, WANG Qiang, et al. Study on individual tree factor extraction of Larix olgensis in Backpack Lidar[J]. Forest Engineering, 2019, 35(4): 14-21. (in Chinese with English abstract)
[19] 赵琦,李震,陈丽华,等. 基于背包式激光雷达的林木胸径和树高提取[J]. 林业调查规划,2022,47(4):18-22. doi: 10.3969/j.issn.1671-3168.2022.04.004 ZHAO Qi, LI Zhen, CHEN Lihua, et al. Extraction of individual tree DBH and height based on Backpack LiDAR[J]. Forest Inventory and Planning, 2022, 47(4): 18-22. (in Chinese with English abstract) doi: 10.3969/j.issn.1671-3168.2022.04.004
[20] BIDO T, HIROTAKA M, TAKESHI H, et al. Error estimation of trunk diameter and tree height measured with a backpack LiDAR system in Japanese plantation forests[J]. Landscape and Ecological Engineering, 2022, 19(1): 169-177.
[21] LINO C, JOAQUIN M, HENRIQUE L, et al. Individual tree segmentation method based on mobile Backpack LiDAR point clouds[J]. Sensors, 2021, 21(18): 6007. doi: 10.3390/s21186007
[22] 符利勇,孙华. 基于混合效应模型的杉木单木冠幅预测模型[J]. 林业科学,2013,49(8):65-74. FU Liyong, SUN Hua. Individual crown diameter prediction for Cunninghamia lanceolata forests based on mixed effects models[J]. Scientia Silvae Sinicae, 2013, 49(8): 65-74. (in Chinese with English abstract)
[23] 高慧淋,董利虎,李凤日. 基于混合效应的人工落叶松树冠轮廓模型[J]. 林业科学,2017,53(3):84-93. GAO Huilin, DONG Lihu, LI Fengri. Crown shape model for Larix olgensis plantation based on mixed effect[J]. Scientia Silvae Sinicae, 2017, 53(3): 84-93. (in Chinese with English abstract)
[24] 杨阳,彭浩贤,潘萍,等. 基于混合效应的飞播马尾松林单木冠幅预测模型[J]. 江西农业大学学报,2020,42(5):990-1001. YANG Yang, PENG Haoxian, PAN Ping, et al. Individual crown diameter prediction models for aerially seeded Pinus massoniana based on mixed effects models[J]. Acta Agriculturae Universitatis Jiangxiensis, 2020, 42(5): 990-1001. (in Chinese with English abstract)
[25] DIMITRIOS R, VASSILIKI K, ANGELOS K, et al. A crown width-diameter model for natural even-aged black pine forest management[J]. Forests, 2018, 9(10): 610-610. doi: 10.3390/f9100610
[26] 高凌寒,张晓丽,陈园园. 用机载LiDAR点云数据估测海南博鳌人工经济林单木参数[J]. 农业工程学报,2021,37(16):169-176. GAO Linghan, ZHANG Xiaoli, CHENG Yuanyuan. Estimation of individual tree parameters of plantation economic forest in Hainan Boao based on airborne LiDAR point cloud data[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(16): 169-176. (in Chinese with English abstract)
[27] 朱俊峰,刘清旺,崔希民,等. 地基与无人机激光雷达结合提取单木参数[J]. 农业工程学报,2022,38(14):51-58. ZHU Junfeng, LIU Qingwang, CUI Ximin, et al. Extraction of individual tree parameters by combining terrestrial and UAV LiDAR[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(14): 51-58. (in Chinese with English abstract)
[28] 燕云飞,王君杰,姜立春. 基于混合效应模型的人工红松枝下高模型研建[J]. 北京林业大学学报,2020,42(9):28-36. YAN Yunfei, WANG Junjie, JIANG Lichun. Construction of the height to crown base mixed model for Korean pine[J]. Journal of Beijing Forestry University, 2020, 42(9): 28-36. (in Chinese with English abstract)
[29] 钟思琪,宁金魁,黄锦程,等. 基于混合效应的杉木人工林冠幅模型[J]. 森林与环境学报,2024,44(2):127-135. ZHONG Siqi, NING Jinkui, HUANG Jingcheng, et al. Crown width model of Chinese fir plantation based on mixed effect[J]. Journal of Forest and Environment, 2024, 44(2): 127-135. (in Chinese with English abstract)
[30] 吕乐. 帽儿山天然次生林主要阔叶树种单木冠幅预测模型[D]. 哈尔滨:东北林业大学,2020:20-30. LV Le. Individual Tree Crown Width Predictin Models for Main Broad-leaf Species in Natural Secondary Forest of Maoershan Mountain[D]. Harbin: Northeast Forestry University, 2020: 20-30. (in Chinese with English abstract)
[31] 高畅,王帆. 天然次生白桦单木冠幅预测模型研究[J]. 西南林业大学学报(自然科学),2024, 44(5):129–135. GAO Chang, WANG Fan. Model for predicting individual tree crown width of natural secondary betula platyphylla[J]. Journal of Southwest Forestry University(Natural Sciences), 2024, 44(5): 129–135. (in Chinese with English abstract)
[32] RAM P. SHARMA, ZDENEK VACEK, STANISLAV VACEK. Individual tree crown width models for norway spruce and european beech in czech republic[J]. Forest Ecology and Management, 2016(366): 208-220.
-
期刊类型引用(3)
1. 陈金荣,许燕,周建平,王小荣,罗鸣,徐声彪. 基于YOLO-SSAR的自然环境下红花检测算法. 农业工程学报. 2025(02): 215-223 .  本站查看
本站查看
2. 张洁,杨诚阳,邹佳琪,鲁兆宏,谭先明,杨峰. 基于计算机视觉的大豆与玉米种子计数方法研究. 四川农业大学学报. 2024(05): 1021-1027+1048 . 百度学术
3. 伍荣达,张世昂,付根平,陈天赐,赖颖杰,罗文轩,郭晓耿,朱立学. 基于旋转框定位的改进YOLOv7的香蕉目标检测与定位方法. 农业工程学报. 2024(22): 115-123 . 本站查看
其他类型引用(2)
















计量
- 文章访问数: 60
- HTML全文浏览量: 17
- PDF下载量: 19
- 被引次数: 5





